

Automatic hand-eye calibration method and device for optimal calibration point selection and error automatic measurement
A hand-eye calibration and calibration point technology, which is applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of decreased accuracy, the inability to guarantee the solution of the collected points, and the inconvenience of calibration boards or cameras.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
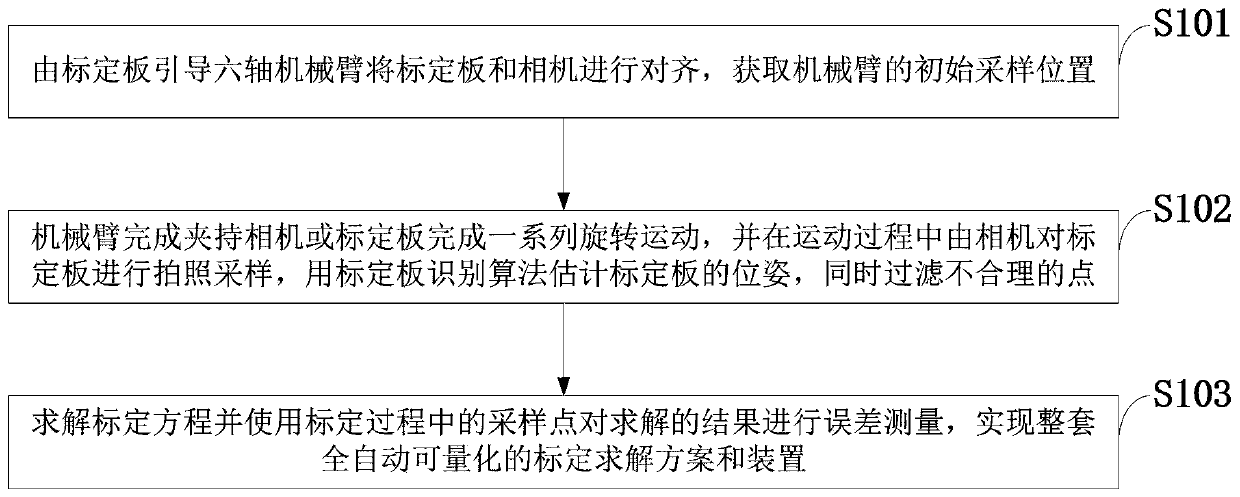
[0291] (1) Eye-in-hand one-click calibration test on the sawyer robot:
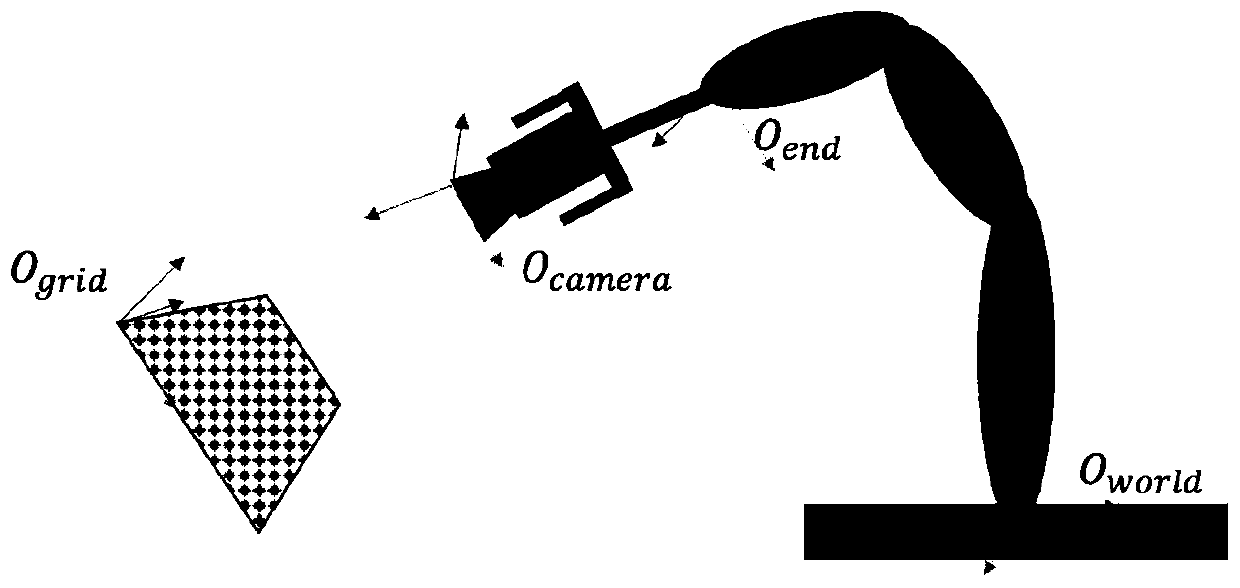
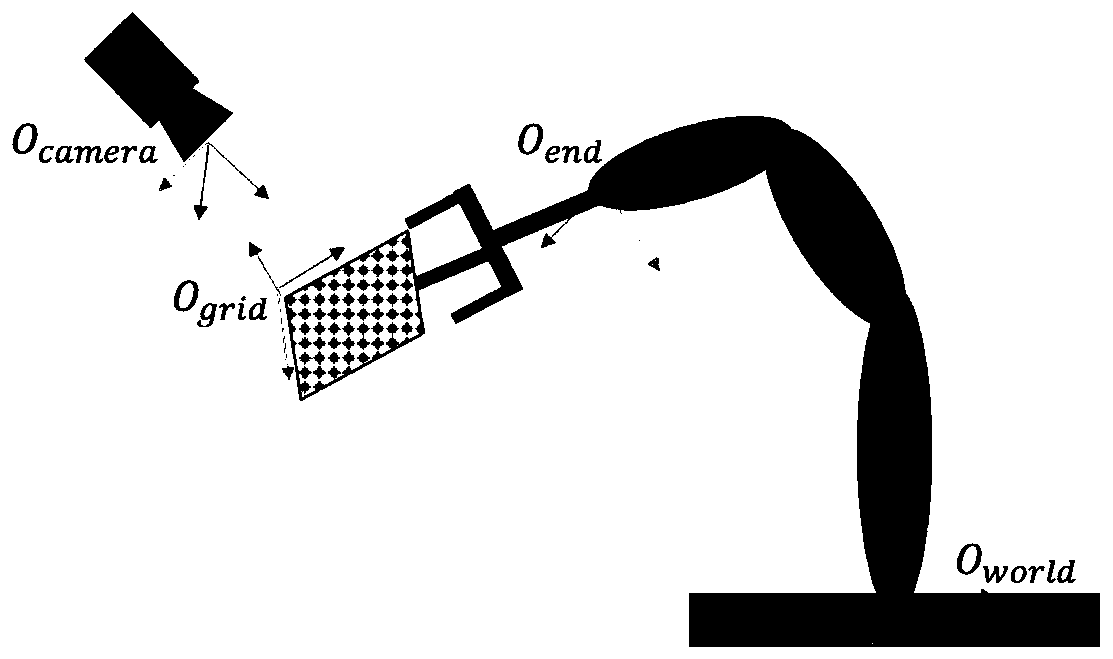
[0292] a) The robot holds the camera and moves around itself to detect whether there is a calibration plate around (such as Figure 11 shown).
[0293] b) The camera detects the existence of the calibration plate, and the robot holds the camera and moves in different directions to estimate the orientation of the calibration plate in the robot coordinate system (such as Figure 12 shown).
[0294] c) The robot estimates the position of the calibration plate, and at this time the end of the mechanical arm has moved directly above the calibration plate (such as Figure 13 shown).
[0295] d) The robot takes the estimated position of the calibration plate as the center, rotates and samples the calibration plate, and records the position of the end of the mechanical arm in the camera coordinate system (such as Figure 14 shown).
[0296] e) Solving the calibration equation, the data collected during the c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More