

Embedded hardware-assisted track tracking synchronization method in distributed environment
A distributed environment, hardware-assisted technology, applied in electrical components, time-division multiplexing systems, instruments, etc., can solve problems such as high cost, and achieve the effect of eliminating time delay and facilitating time accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
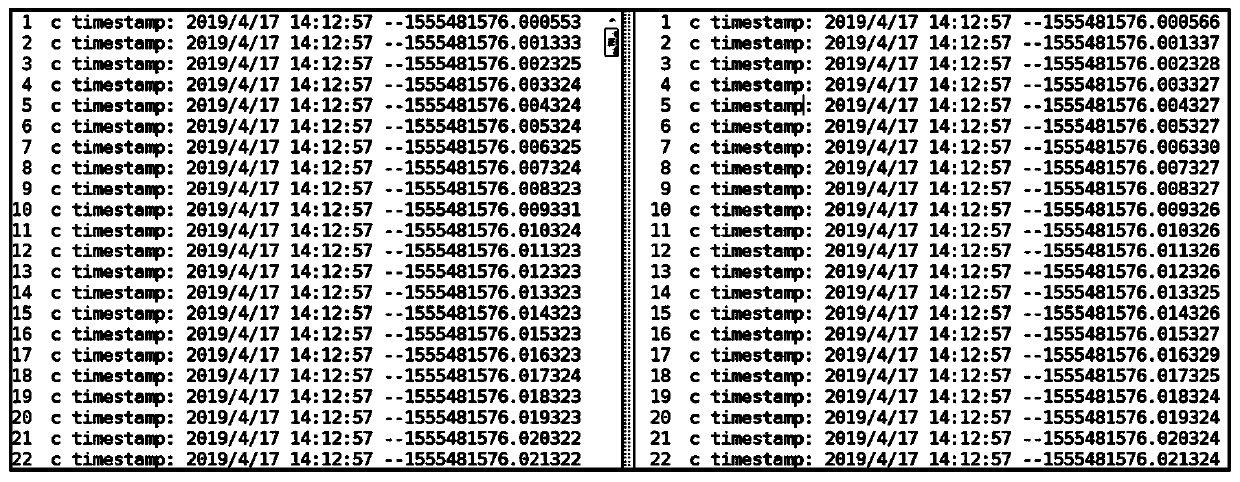
[0038] In order to test the synchronization error between multiple distributed acquisition devices, the experiment selected chrony software and UM220-III Beidou / GPS navigation module to build an NTP system, selected one Raspberry Pi 3B+ as the NTP server, and two Raspberry Pi 3B as the NTP server. Distributed acquisition equipment, one STM32F103RCT6 development board as the target to be tested. The target under test executes the standard mailbox queue engineering code generated by STM32CubeMx and adds a GPIO flip code with a period of 1ms to it, sets two distributed acquisition devices to run the GPIO acquisition program at the same time to collect the GPIO flip of the target under test, and uses sys The gettimeofday function in / time.h marks the Unix timestamp, and the final collection result is as follows figure 2 shown. The timestamp format is a combination of the year, month, day, hour, minute, and second of Beijing time and its corresponding Unix timestamp. figure 2 O...
Embodiment 2
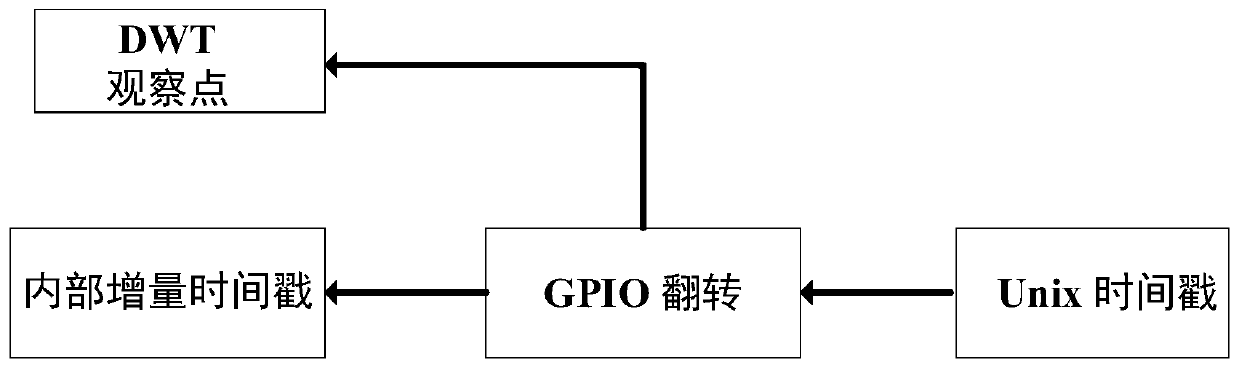
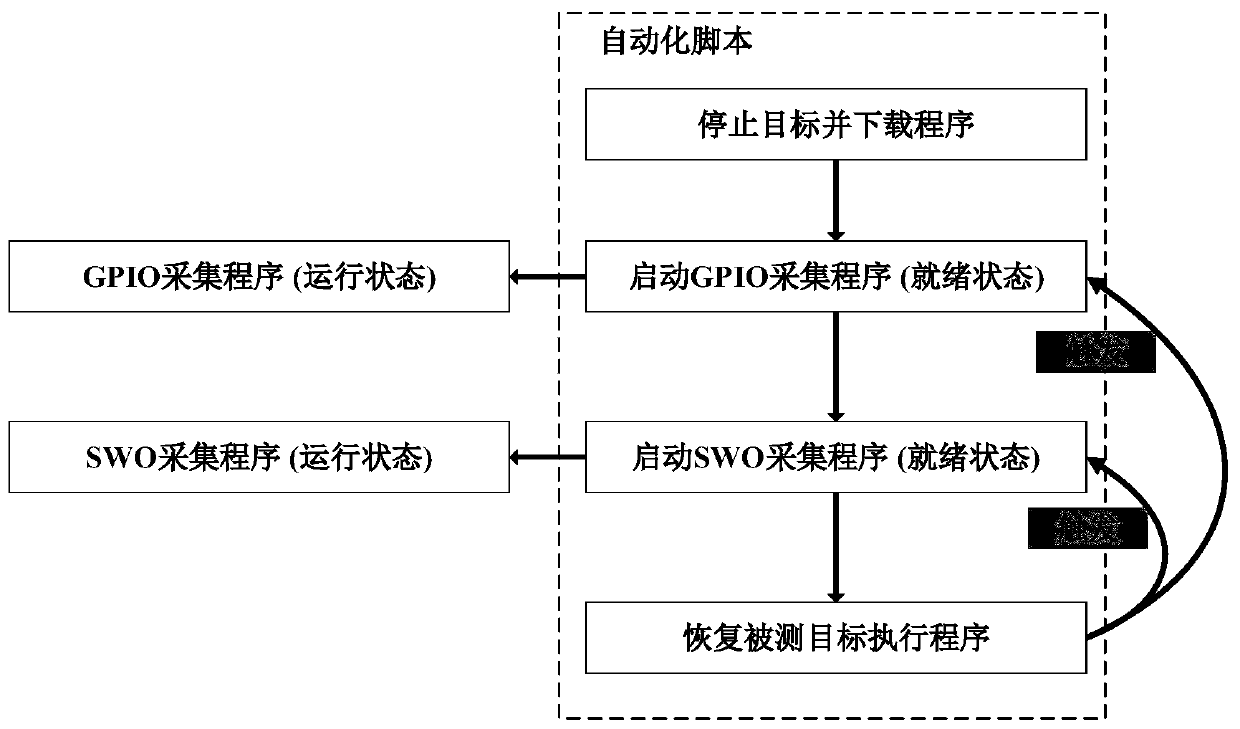
[0040]Correlating internal and external timestamps, the experiment selected a Raspberry Pi 3B as a distributed acquisition device, a STM32F103RCT6 development board as the target to be tested, and a CY7C68013A for tracking data acquisition, and CY7C68013A is connected to the distributed acquisition device through a USB interface. The target under test executes the standard mailbox queue engineering code generated by STM32CubeMx, and adds a GPIO flip code with a period of 1ms to it. see image 3 , first stop the operation of the target under test and download the code of the project under test, then start the GPIO acquisition program (collect GPIO in an interrupt mode and mark the Unix time stamp) and SWO acquisition program (manipulate CY7C68013A), because the operation of the target under test is not restored, so There is no GPIO flipping and tracking data arrival, both programs enter the ready state, and then the target under test is restored, and the target under test execu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More