

Semantic navigation method and system used for ground sweeping robot
A technology of sweeping robot and navigation method, which is applied in the direction of control/regulation system, two-dimensional position/channel control, instruments, etc., to achieve the effect of solving missed sweeps and improving cleaning efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
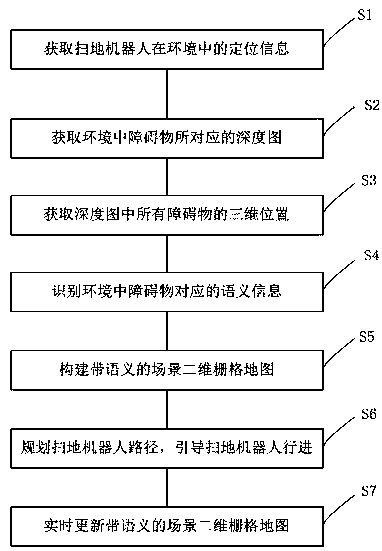
[0057] refer to figure 1 , the implementation of the semantic navigation method for sweeping robots, including the following steps:
[0058] Step S1: Obtain the positioning information of the sweeping robot in the environment;
[0059] Step S2: Obtain the depth map corresponding to the obstacles in the environment;
[0060] Step S3: Obtain the three-dimensional positions of all obstacles in the depth map;
[0061] Step S4: Identify semantic information corresponding to obstacles in the environment;
[0062] Step S5: Construct a two-dimensional grid map of the scene with semantics;
[0063] Step S6: Plan the path of the sweeping robot and guide the sweeping robot to move forward;
[0064] Step S7: Updating the two-dimensional grid map of the scene with semantics in real time.
[0065] In this embodiment, in step S1, obtaining the positioning information of the sweeping robot in the environment also includes the following steps:
[0066] Step S11: Acquire image P 1 , imag...
Embodiment 2
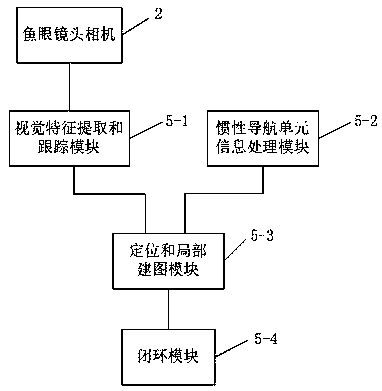
[0102] refer to Figure 5 , The difference between this embodiment and Embodiment 1 is only that: the lens direction of the fisheye lens camera 2 forms an angle of 45 degrees with the X axis in the XZ axis plane, and the rest are the same as Embodiment 1.
[0103] In practical applications, the lens direction of the fisheye camera 2 can be set according to actual needs, and the lens direction of the fisheye camera 2 can be set to form an angle of 30-90 degrees with the X axis in the XZ axis plane.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More