

Cleaning method using cleaning robot by means of edgewise navigating and intro-expanding
A cleaning robot and navigation technology, applied in the field of cleaning robots, can solve the problems of expensive navigation devices, high cost and price of cleaning robots, and difficulty in popularization and use, so as to avoid missing or repeated cleaning, complete cleaning, and improve cleaning efficiency effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
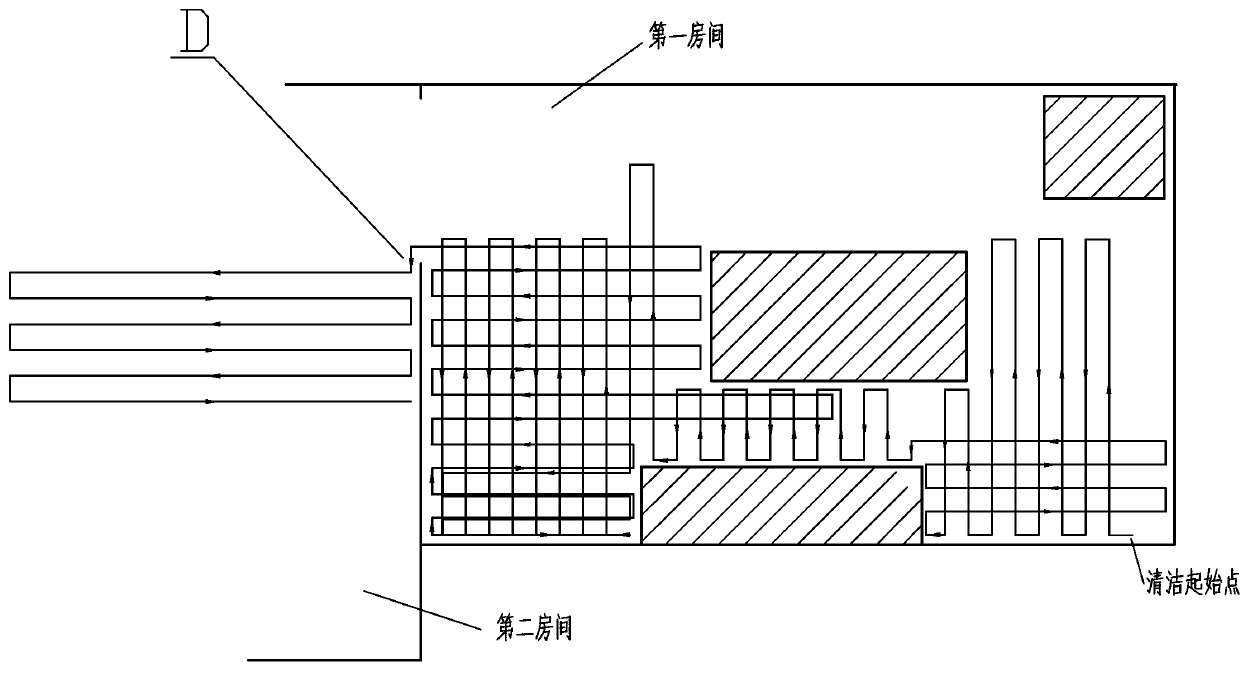
[0028] A cleaning method for a cleaning robot that navigates inwardly and expands along the edge, and the cleaning robot travels along the outer wall of a room. The cleaning robot travels along the outer walls of the room. During the process, the cleaning robot leaves the outer wall of the wall several times and moves away from the outer wall of the wall to clean the ground. Each time the cleaning robot leaves the outer wall of the wall for a certain distance or encounters an obstacle, it first turns a preset angle, then travels a preset distance, and then returns to the outer wall of the wall to complete the traversal of the area to be cleaned and clean. It is worth noting that the preset distance and preset angle mentioned in this paragraph can be adjusted according to actual needs. They are recorded as preset distance Ⅰ and preset angle Ⅰ respectively. In addition, every time the robot returns to the wall and leaves the outer wall of the wall, it needs to change the dire...
Embodiment 2
[0037] The basic situation of this embodiment is the same as that of Embodiment 1, except that a mode of "inward extension" is provided. That is, there are three situations when expanding inward: the distance between the furthest point and the outer wall of the wall is at least 1 / 2 of the width of the room, or the furthest point is the point where the cleaning robot stops due to encountering an obstacle. point, or the distance between the farthest point and the outer wall of the wall is a preset value.
[0038] Further, the distance between the farthest point and the outer wall of the wall can be set by the user, or the room width can be measured by a sensor installed on the cleaning robot. Preferably, the distance is not less than half of the distance between the departing boundary and the opposite boundary on the path of the cleaning robot, so as to ensure that the area to be cleaned is covered.
[0039] Of course, if there are obstacles in the room, the cleaning robot cann...
Embodiment 3
[0042] The basic situation of this embodiment is the same as that of Embodiment 2, except that it is further disclosed to deal with the complicated arrangement of obstacles in the room.
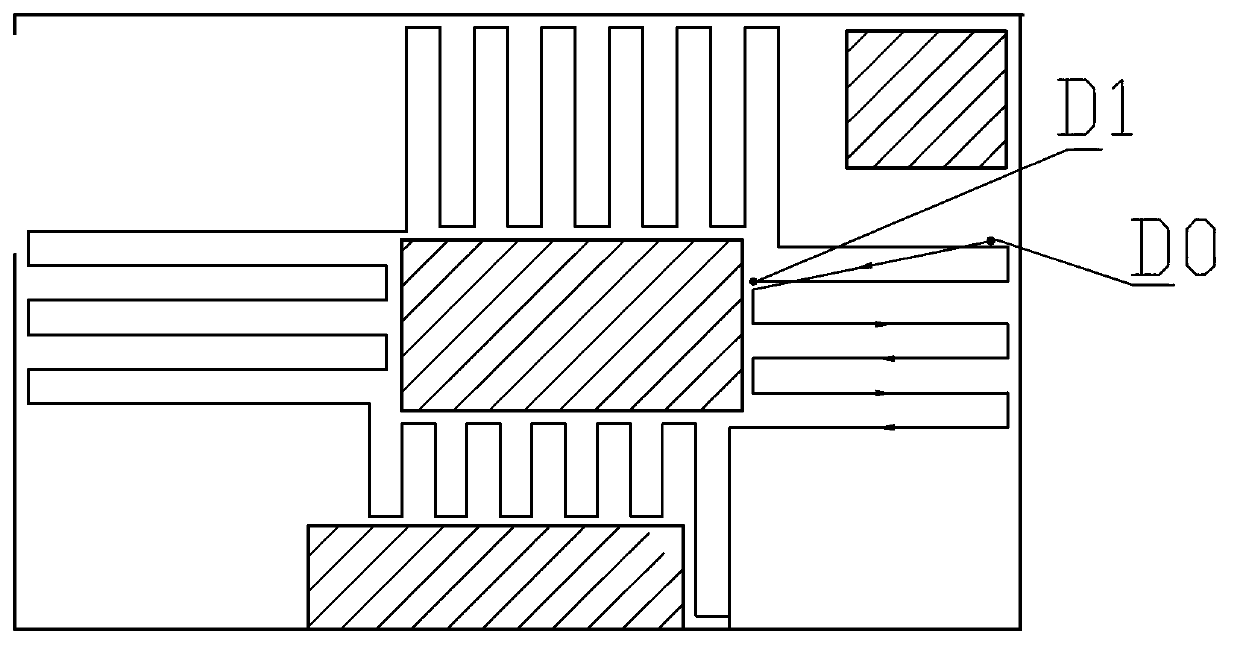
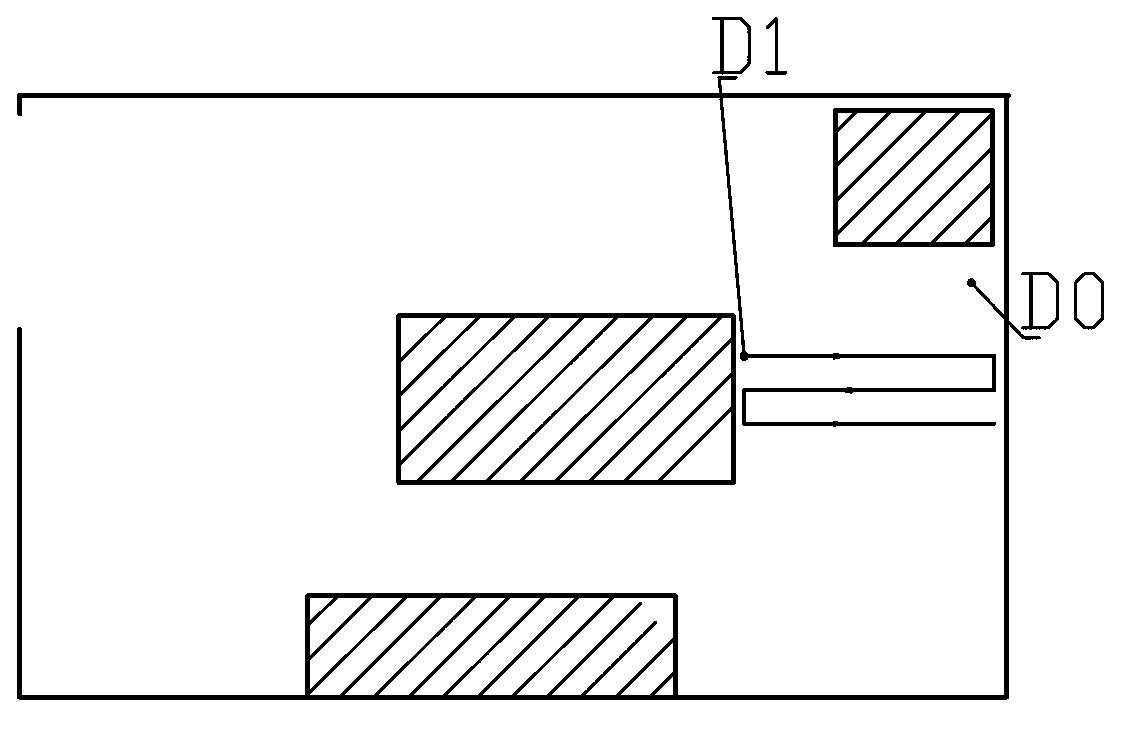
[0043] see figure 1 , shown in the figure are two rooms with several obstacles placed. In an embodiment, when there is an obstacle close to the outer wall of the wall, the cleaning robot regards the surface of the obstacle not in contact with the outer wall of the wall as the outer wall of the wall ( Such as figure 1 obstacle directly below the first room in the middle). In this embodiment, the cleaning robot starts from the "cleaning starting point" in the first room and travels along the wall. Because it keeps leaving the wall and returning constantly during the process, it is easy to go to the entrance and exit of the room to realize the cleaning of multiple rooms. figure 1 At point D, the cleaning robot smoothly enters the second room from the first room. Similarly, after the cleanin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More