

Ankle joint power-assisted exoskeleton
A technology of exoskeleton and ankle joints, which is applied in the direction of appliances that help people walk, belts/chains/gears, physical therapy, etc. It can solve the problems of reduced power-assist effect, large volume, mass, and weight, and achieve the reduction of the quality of subsidiary mechanisms , Small size, light weight effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
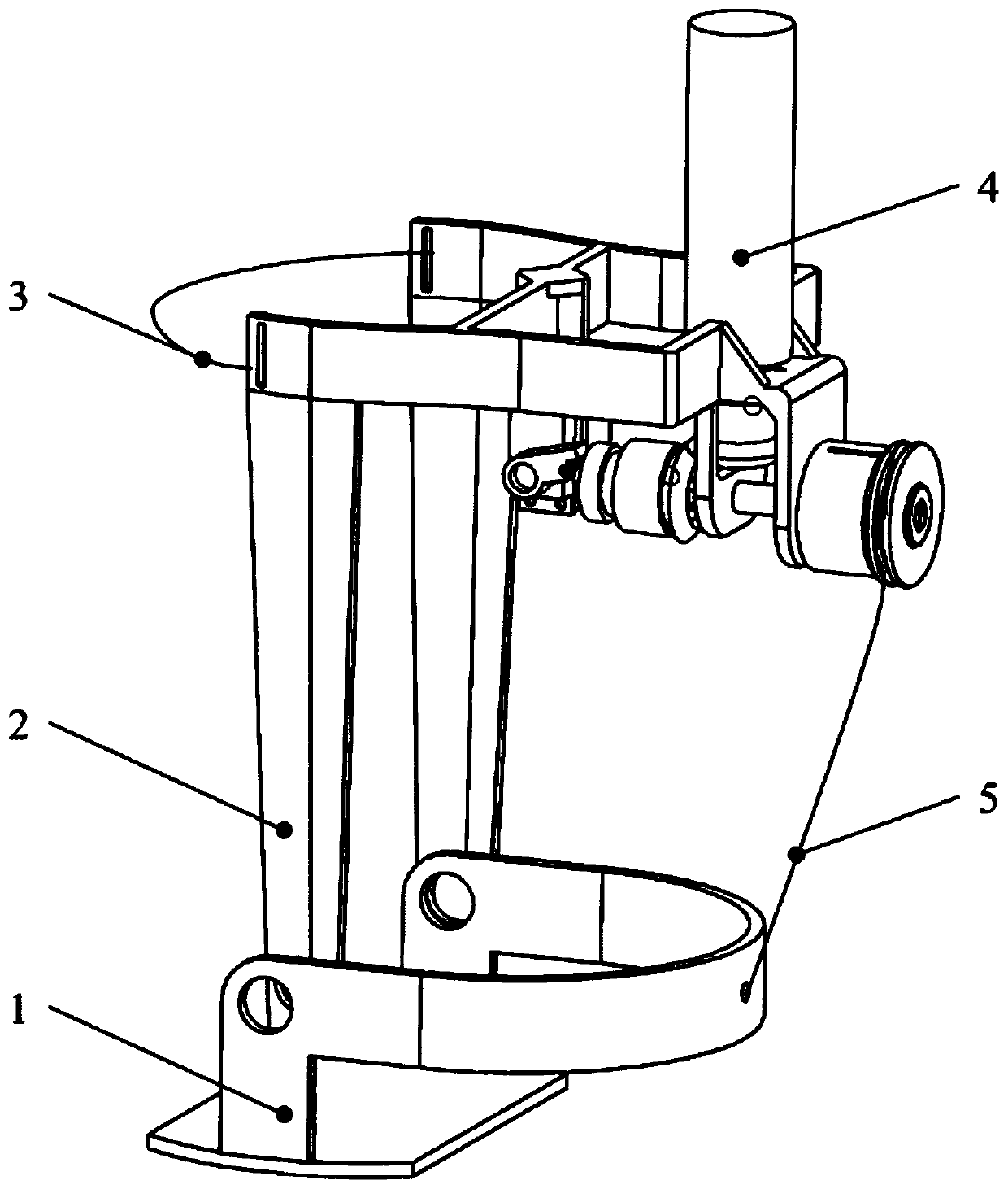
[0019] The object of the present invention is to propose a light-duty ankle exoskeleton booster mechanism with peak power amplification. The ankle exoskeleton booster mechanism considers that the direct booster exoskeleton only provides boosting when the pedal is on the ground in a gait cycle. It is characterized by short time and high power. The work time is only about 18% of the entire gait cycle, and the output power of the motor cannot be used well. However, if the motor is stored in the remaining 82% of the gait cycle with the help of springs and other energy storage mechanisms The work done is concentrated and released when assistance is needed, which can greatly reduce the requirements for motor power.
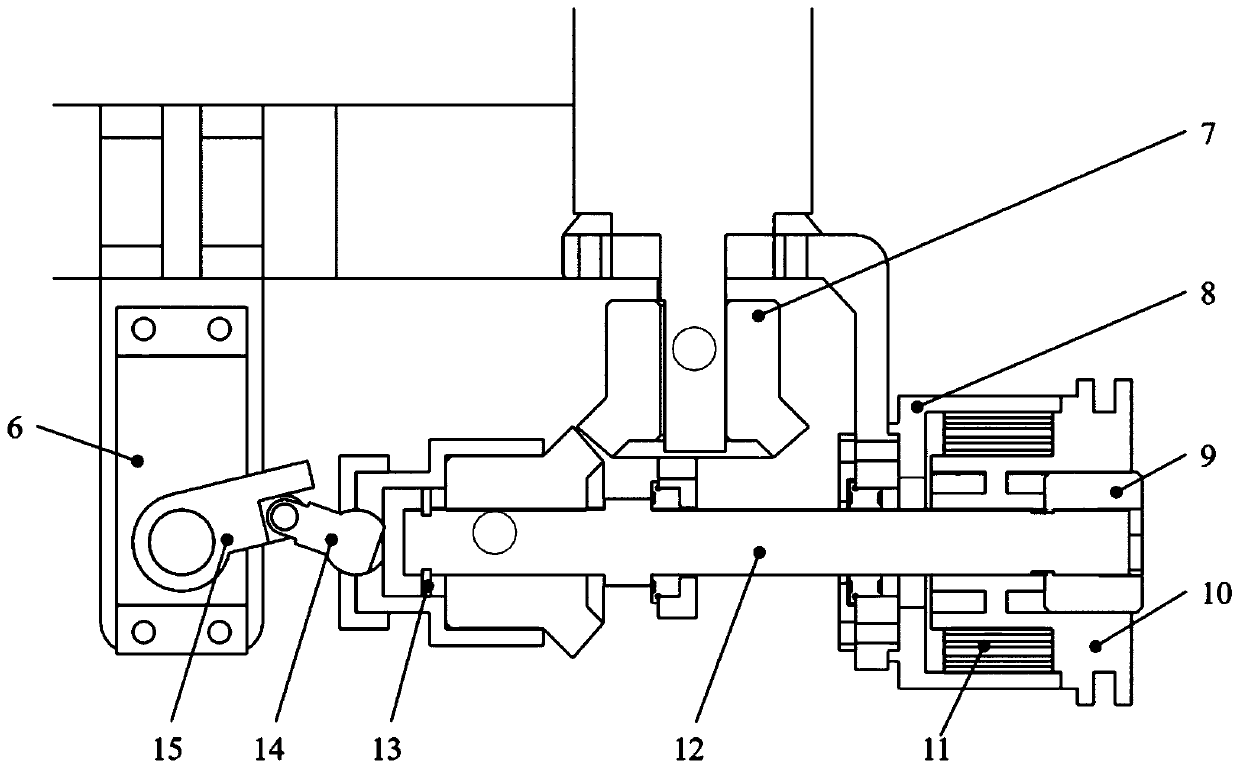
[0020] The invention discloses an ankle joint power-assisted exoskeleton, comprising a power mechanism, a clutch, an exoskeleton frame pedal 1, and an exoskeleton frame 2, the power mechanism and the clutch are installed on the exoskeleton frame 2, the The exoskeleton f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More