

Exoskeleton rehabilitation robot control system
A rehabilitation robot and control system technology, which is applied in the fields of helping people move around, medical science, diagnosis, etc. It can solve the problems of single driving motor movement, lag, patient gait prediction, etc., to broaden the scope of use, achieve consistent, The effect of reducing hysteresis
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
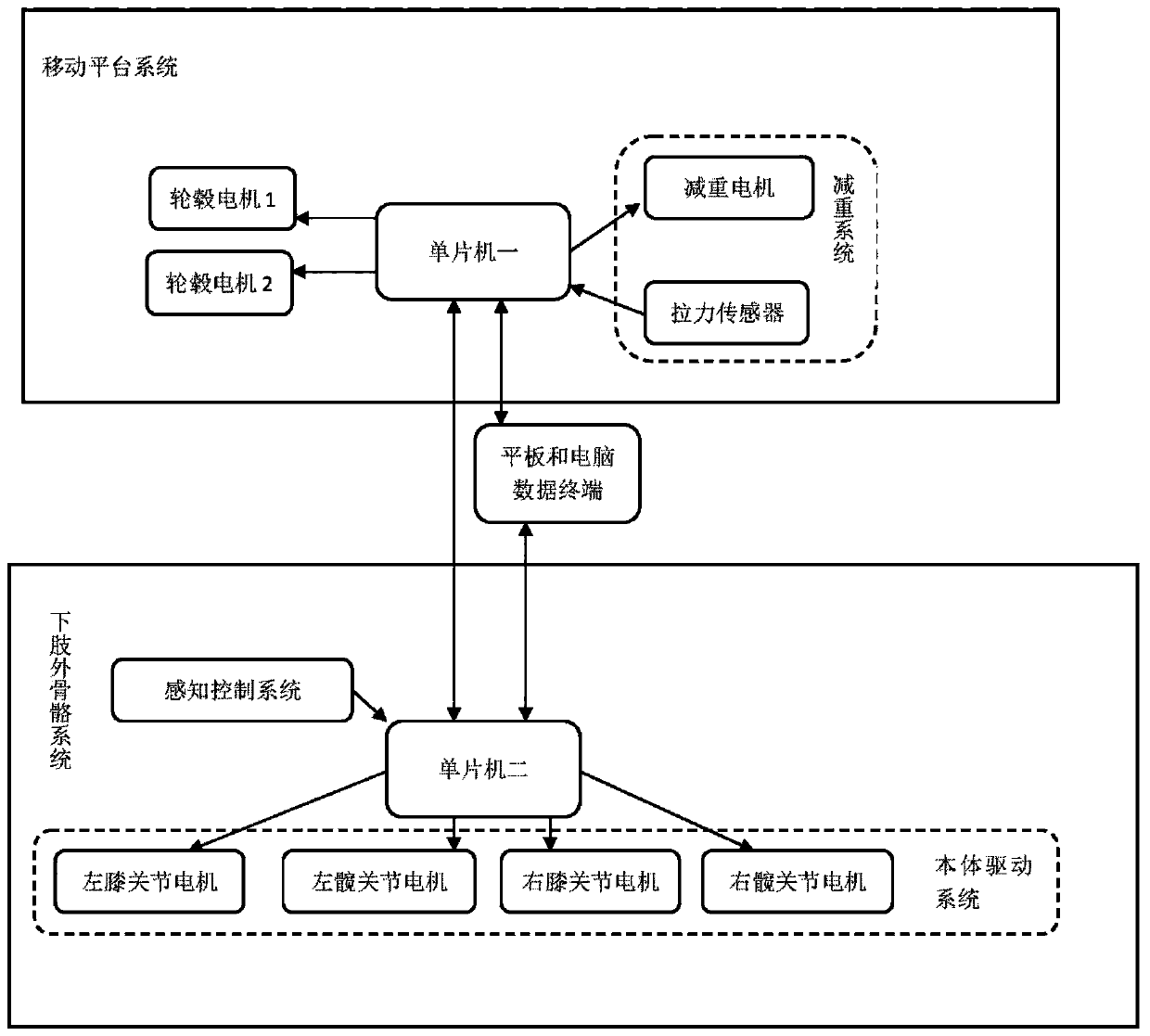
[0027] An exoskeleton rehabilitation robot control system, such as figure 1 As shown, including mobile platform system, lower extremity exoskeleton system and data terminal, among them:
[0028] The mobile platform system includes a single chip microcomputer, a hub motor, and a weight reduction system. The hub motor is installed on the lower side of the mobile platform to drive the mobile platform to move. The weight reduction system includes a weight reduction motor and a tension sensor. The heavy motor is installed on the mobile platform to drive the weight reduction device to move up and down. The tension sensors are installed on both sides of the mobile platform; the single-chip microcomputer is installed on the mobile platform, and it is connected to the hub motor and the weight reduction motor. Specifically, the can interface of the single-chip microcomputer is electrically connected to the can interface of each motor driver, and each motor driver is connected to each motor ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More