

Unmanned aerial vehicle path planning method taking laser scanning as constraint
A technology of path planning and laser scanning, which is applied in the directions of measuring devices, instruments, surveying and navigation, etc., can solve the problems of areas lacking geographical environment information, complex algorithms, and planning paths that cannot reach the global optimum.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
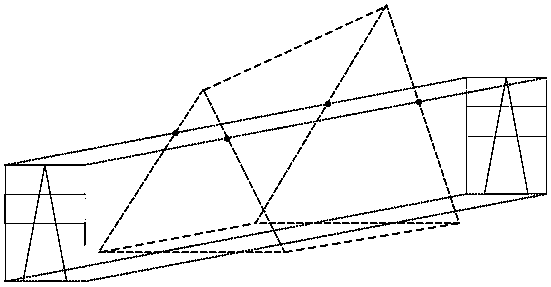
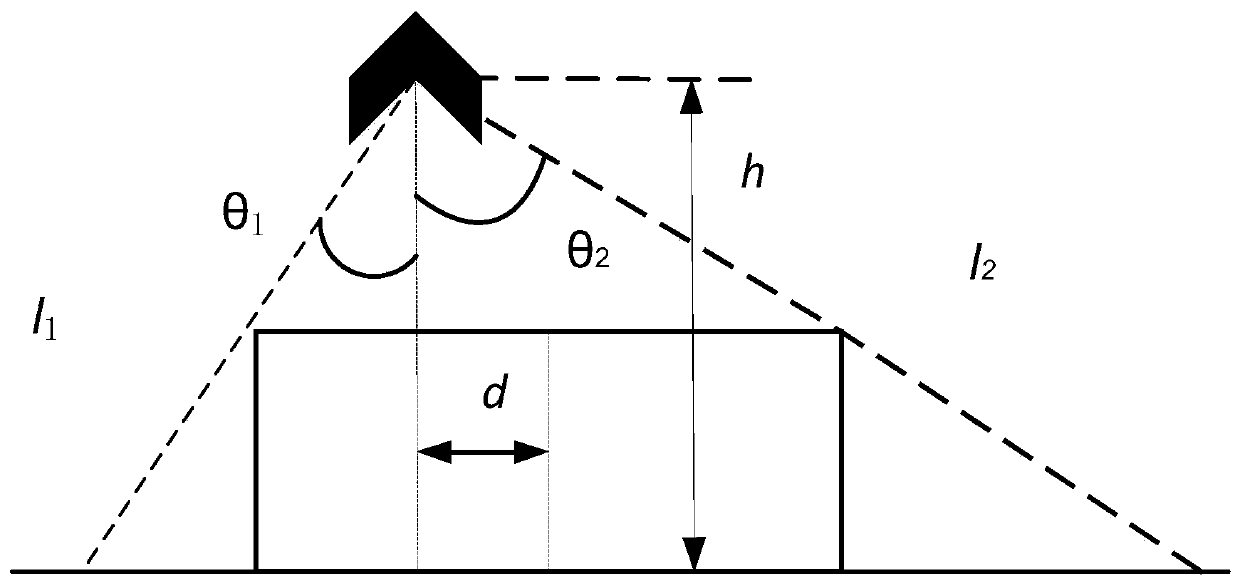
[0025] The invention solves the path planning problem of the unmanned aerial vehicle under the constraint condition of laser scanning. Taking the minimum voyage as the path cost function, define the detection space between the two towers as a cuboid, construct a restriction strategy for measuring the angle of the laser sensor, measuring the maximum distance of the ground target, and the lateral distance between the UAV and the tower, so as to ensure that the UAV laser The scan area coincides with the cuboid area.
[0026] First, set the position of the UAV at time t as (x(t), y(t), z(t)), and the speed of the UAV as v(t), then the expression of the flight range d of the UAV is as follows:
[0027]
[0028] The UAV planning cost function J(t) is set as follows:
[0029]
[0030] Then, define the detection interval between the two towers as a cuboid. In order to ensure the integrity of the tower information, the height of the cuboid is set as the height of the tower, the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More