

Power-assisted exoskeleton control system and method
A control system and exoskeleton technology, which is applied in the field of exoskeleton robots and robots, can solve the problems of rapid population growth, inability to meet the rehabilitation needs of the elderly, and low equipment efficiency and intelligence.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] In order to understand the technical content of the present invention more clearly, the following examples are given in detail.
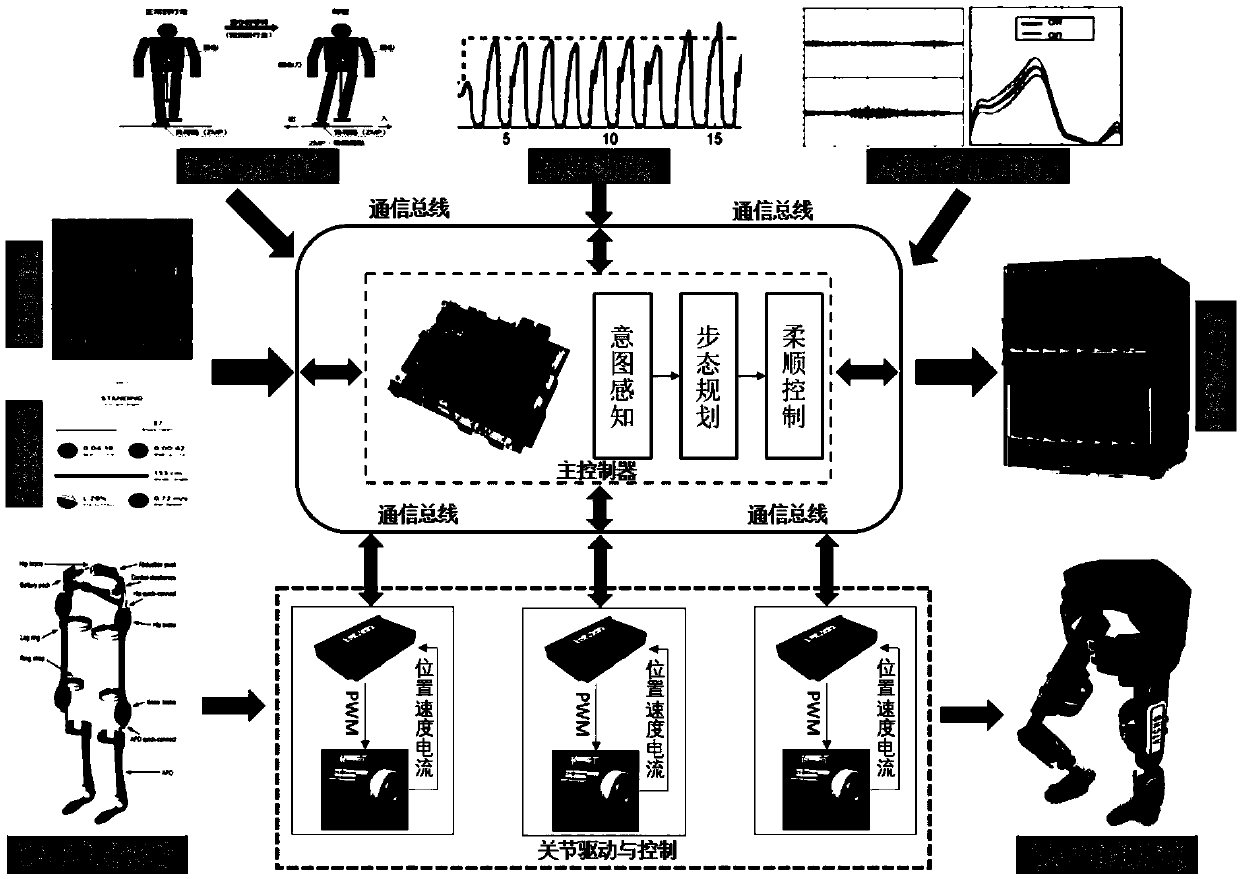
[0032] see figure 1 Shown is the structural diagram of the power-assisted exoskeleton control system of the present invention.
[0033] In one embodiment, the system includes: a sensory communication execution subsystem and a processing planning decision-making subsystem.
[0034] The sensor communication execution subsystem is used to perceive the motion intention, motion state and physiological information. Its computing main control platform makes command decisions based on the human-machine coupling information, and drives the robot joints to provide timely and appropriate assistance;
[0035] The processing and planning decision-making subsystem is used to realize the fusion of human-computer information interaction and human-machine consciousness based on the motion intention identification method and bioelectrical signal analysis tech...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More