

Handling system, control method thereof and floor tile laying system
A technology of a handling system and a control method, applied in the field of robots, can solve the problem that the robot cannot meet the requirements of tiling accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0036] According to an embodiment of the present invention, an embodiment of a method for controlling a handling system is provided. It should be noted that the steps shown in the flowcharts of the accompanying drawings can be executed in a computer system such as a set of computer-executable instructions, and , although a logical order is shown in the flowcharts, in some cases the steps shown or described may be performed in an order different from that shown or described herein.
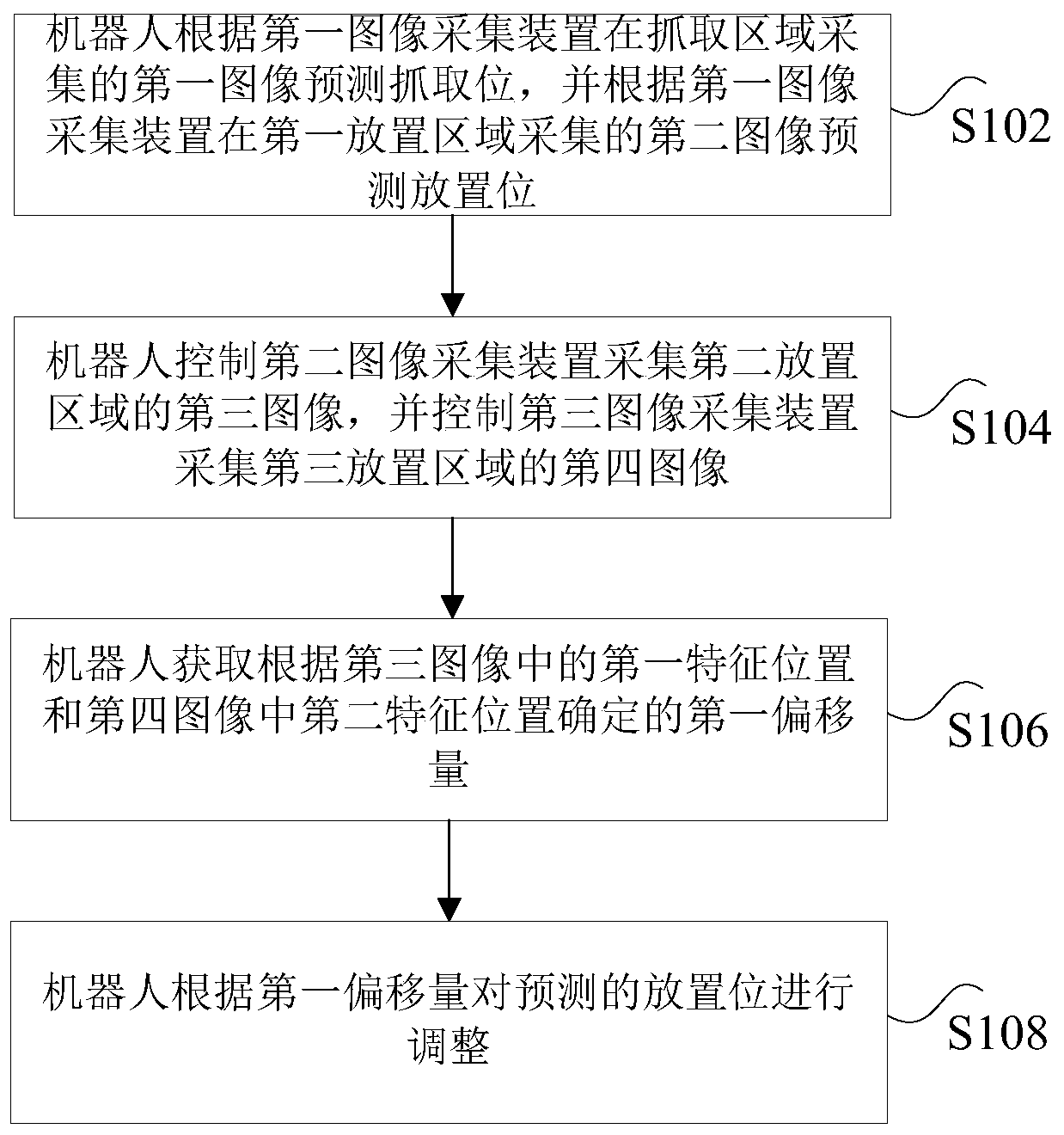
[0037] figure 1 It is a flowchart of a control method of a transport system according to an embodiment of the present application, and the transport system includes: a first image acquisition device, a second image acquisition device, a third image acquisition device and a robot, such as figure 1 As shown, the method includes the following steps:
[0038] Step S102, the robot predicts the grasping position according to the first image captured by the first image capture device in the grasping area...
Embodiment 2
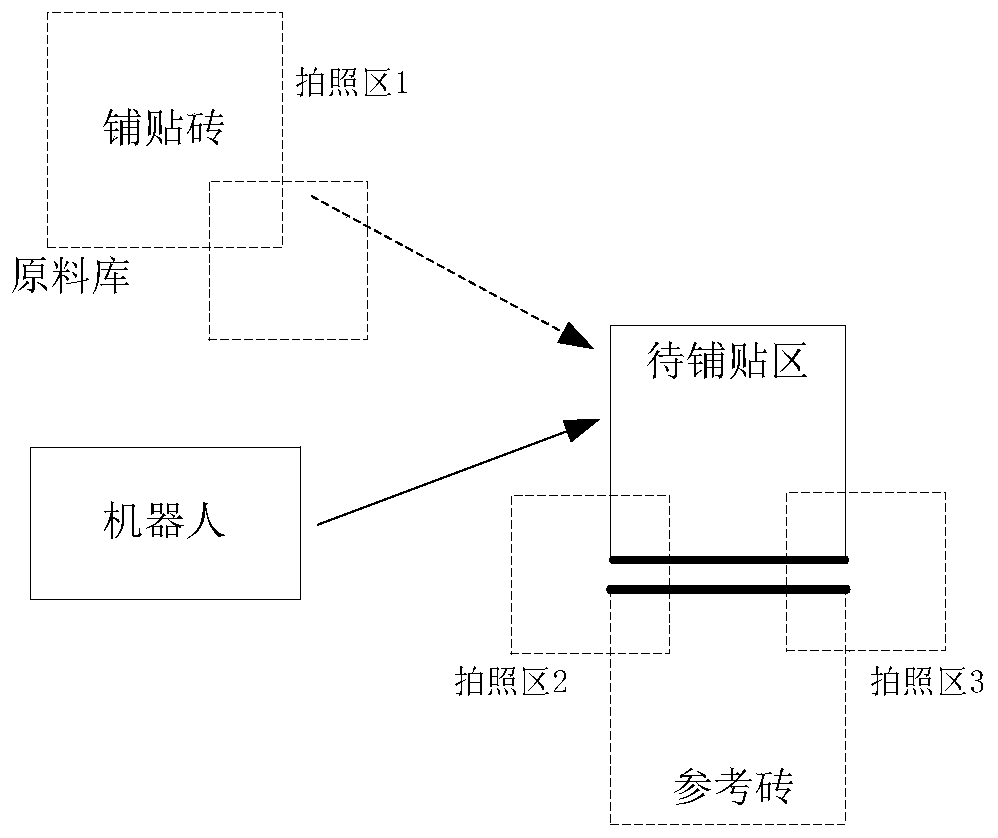
[0093] The embodiment of the present application also provides a transport system, which may be a system that performs any step in Embodiment 1. Figure 5 is a schematic diagram of a handling system according to an embodiment of the present application, combined with Figure 5 As shown, the system includes:
[0094] The first image acquisition device 10 is configured to acquire a first image in the grasping area and a second image acquired in the first placing area, predict the grasping position according to the first image, and predict the placing position according to the second image.
[0095] Specifically, the above-mentioned image acquisition devices may all be smart cameras, wherein the first image acquisition device may be a smart camera arranged at the end of the mechanical arm. The robot may include a pole, and the second image acquisition device and the third image acquisition device are arranged at the end of the pole.
[0096]In an optional embodiment, taking the...
Embodiment 3
[0137] According to an embodiment of the present invention, an embodiment of a control method of a transport system is provided, Figure 9 is a flow chart of another control method for a transport system according to an embodiment of the present application, combined with Figure 9 As shown, the method includes:
[0138] Step S902, predicting the grabbing position according to the first image collected in the grabbing area, and predicting the placement position according to the first placement area.
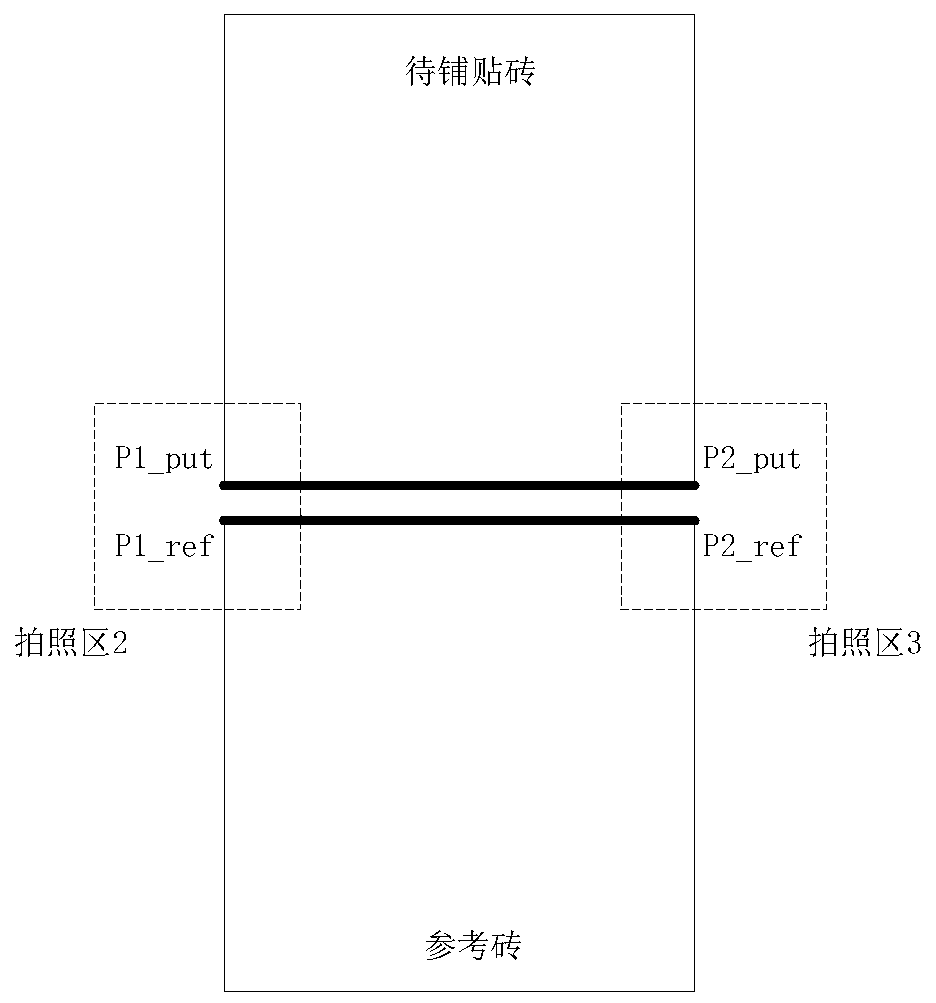
[0139] Step S904, acquiring a third image of the second placement area and a fourth image of the third placement area, wherein the second placement area and the third placement area include two different characteristic positions of the placed object.
[0140] Step S906, the first offset determined according to the first feature position in the third image and the second feature position in the fourth image, wherein the first offset is used to represent the deviation between the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More