

Badminton picking robot and control method thereof
A badminton and robot technology, applied in the field of robotics, can solve the problems of unrecognizable badminton, unsuitable for picking up badminton, serious badminton damage, etc., and achieve the effect of improving the efficiency of picking up the ball, low power consumption, and high-efficiency picking
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0055] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
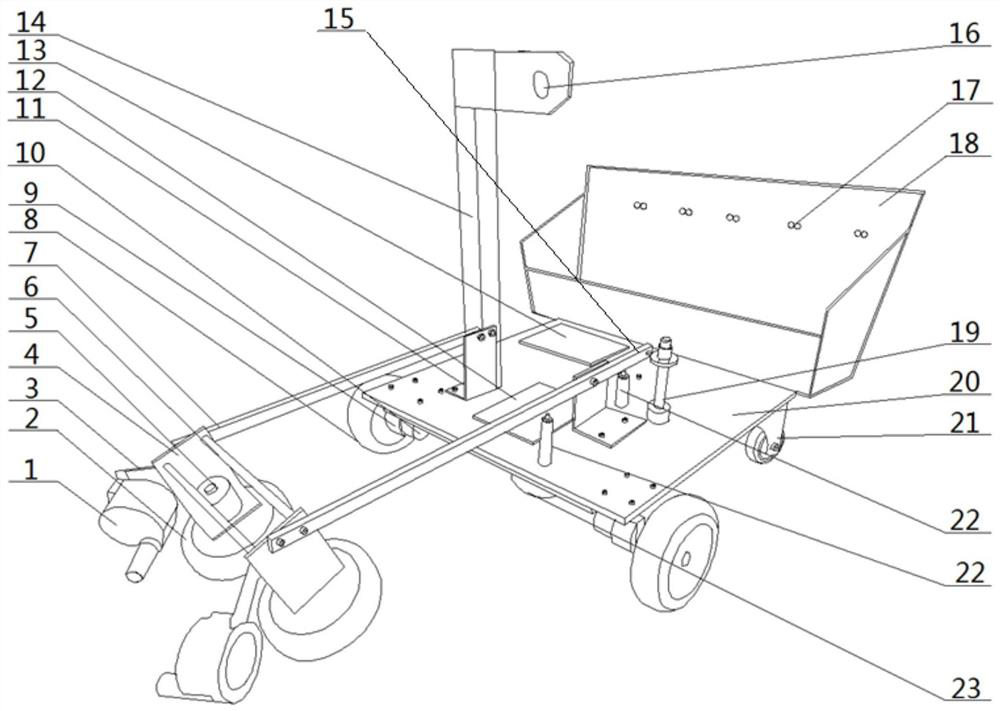
[0056] like figure 1 As shown, the shuttlecock picking robot of the present invention includes a mobile car, a ball picking device, a positioning device, a shuttlecock collecting device and a control circuit.
[0057] like figure 1 As shown, the mobile trolley includes a mobile trolley body and a platform 20 arranged on the mobile trolley body. The mobile trolley body includes two driving wheels 8, two displacement motors 9, two Hall encoders 10 and two driven wheels 21; the two driven wheels 21 are symmetrically installed at the rear end of the platform 20 bottom; two displacement The motor 9 is symmetrically installed at the front end of the bottom of the platform 20; the two driving wheels 8 are respectively connected to the two displacement motors 9 in one-to-one correspondence; the two displacement motors 9 are used to provide straight-l...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More