Multi-axis motion control method of industrial robot
An industrial robot, multi-axis motion technology, applied in the direction of program-controlled manipulators, manipulators, manufacturing tools, etc., can solve the problems of unstable placement and angle, incapable of working in an assembly line, etc., to achieve versatility and stability. Good, broad coverage
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
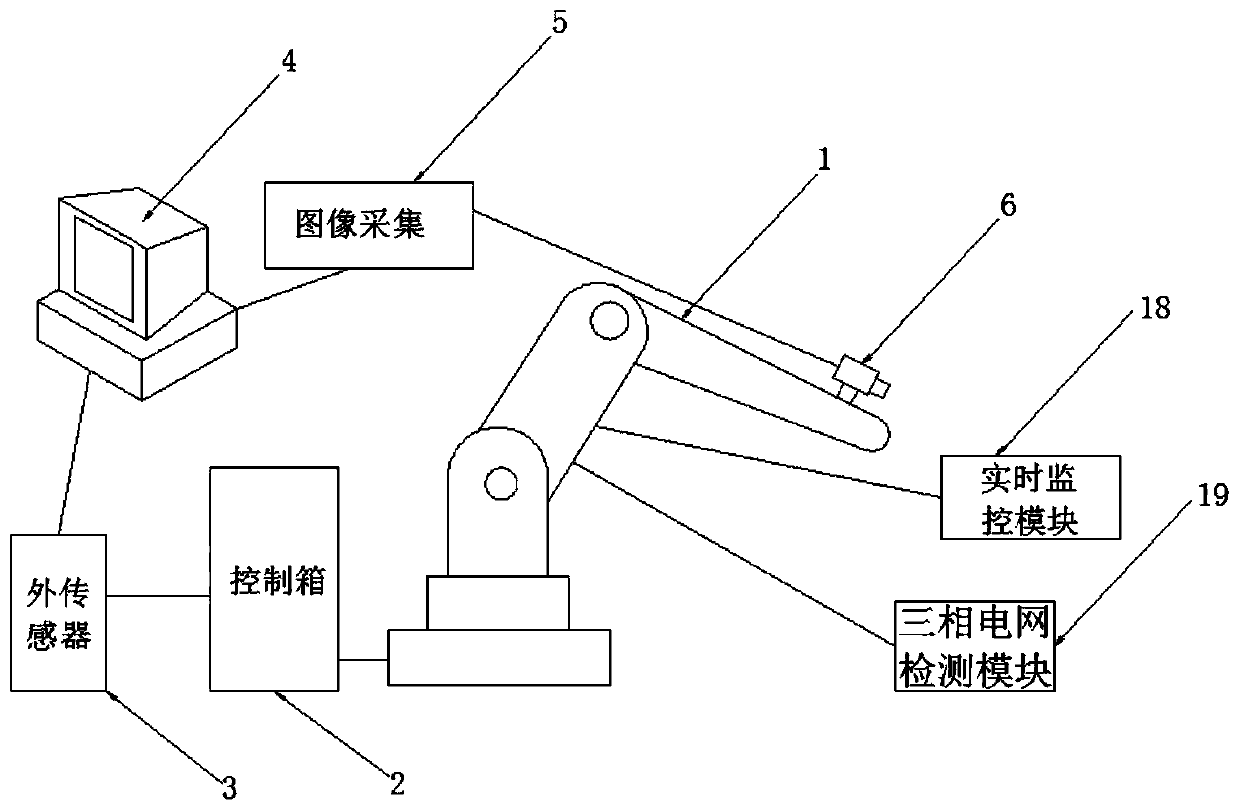
[0040] Examples such as Figure 1-2 As shown, a multi-axis motion control method for an industrial robot according to an embodiment of the present invention includes an industrial robot 1, the industrial robot 1 is connected to one end of the control box 2, and the other end of the control box 2 is connected to one end of the external sensor 3, The other end of external sensor 3 is connected with one end of computer 4, and the other end of computer 4 is connected with one end of image acquisition 5, and the other end of image acquisition 5 is connected with camera 6, and camera 6 is positioned on industrial robot 1, wherein, also It includes a three-phase grid detection module 18 and a real-time monitoring module 19 for monitoring the power of the industrial robot 1 .
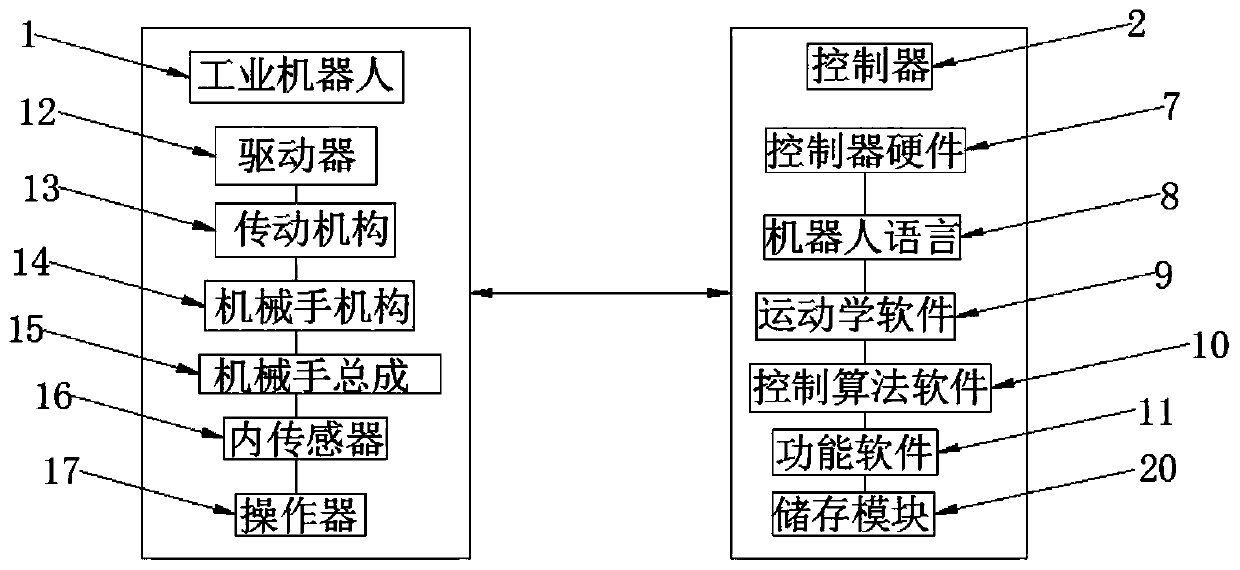
[0041] Such as figure 2 As shown, the control box 2 includes controller ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More