

Pipeline panoramic detection robot
A robot and panoramic technology, applied in the field of robots, can solve problems such as inconvenience, pipeline corrosion, explosion, etc., to ensure the effect of detection, change the degree of tension, and have a wide range of application prospects.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
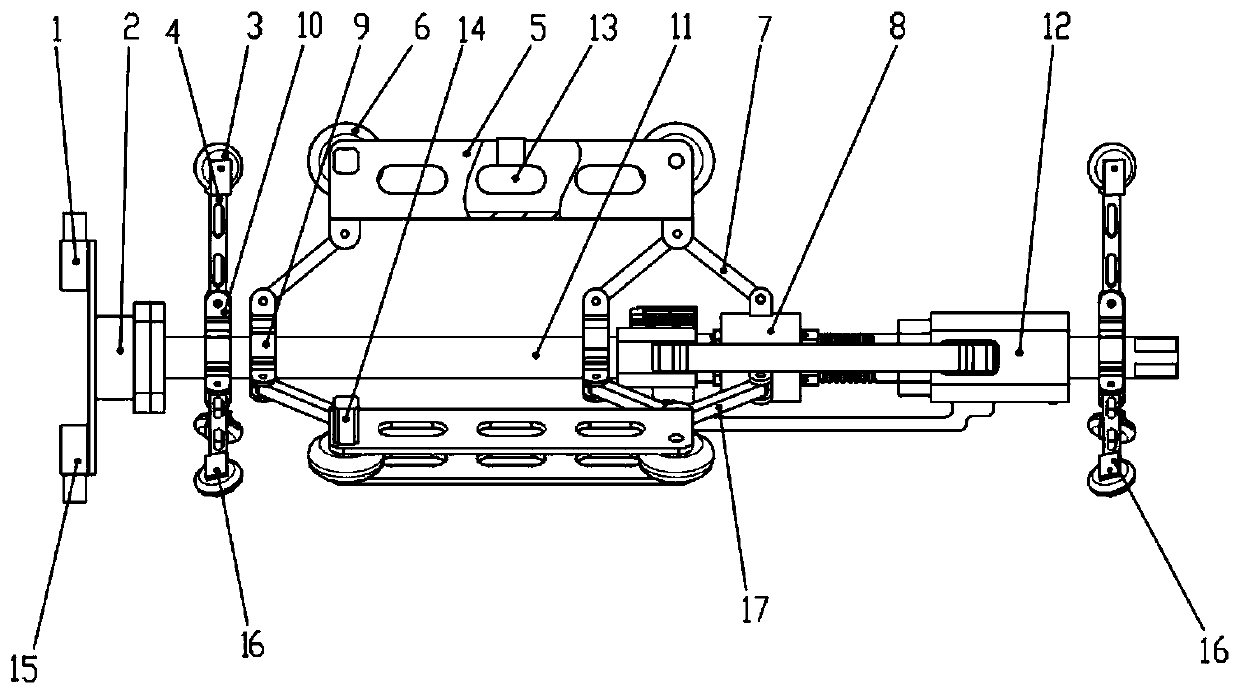
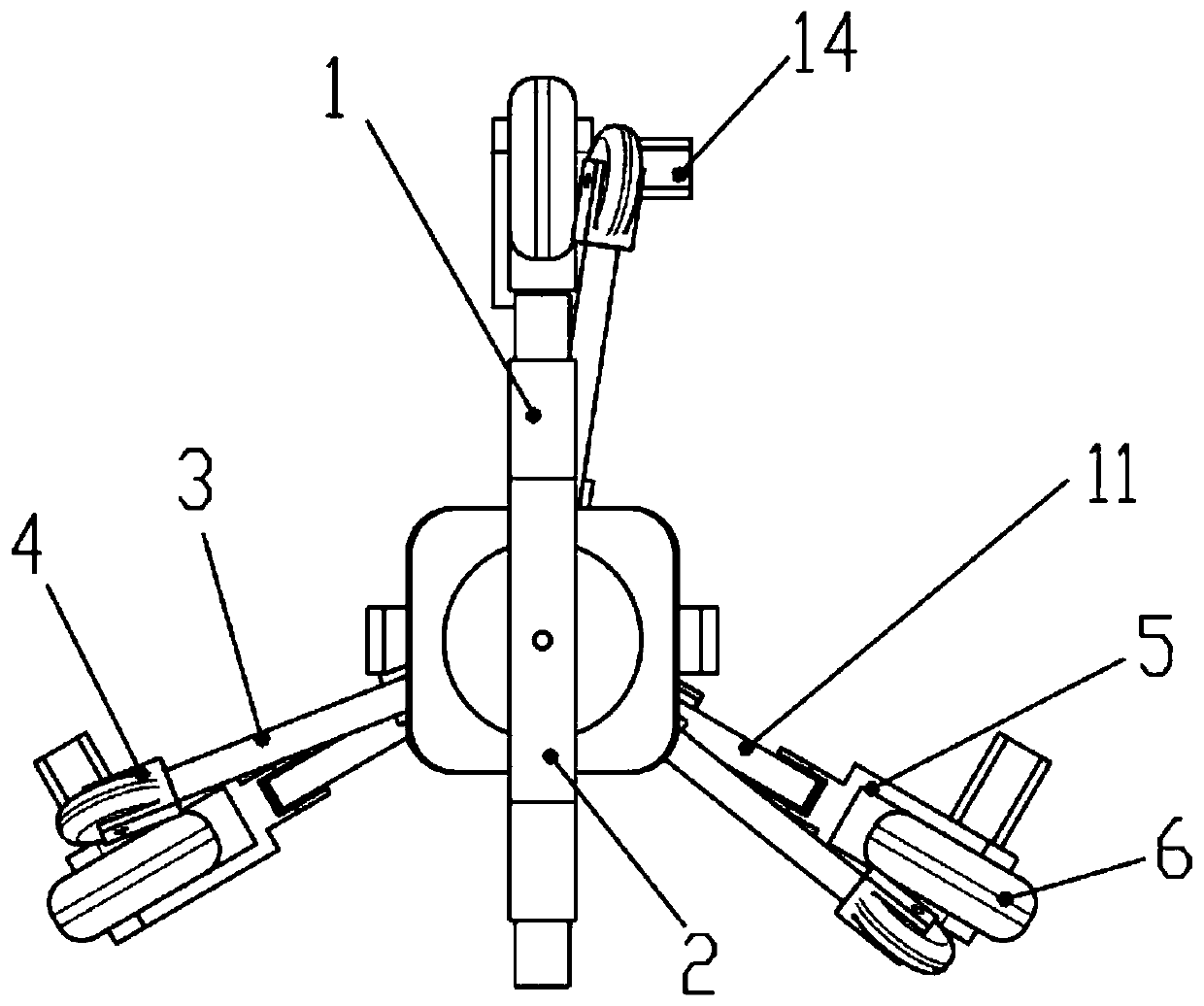
[0024] refer to Figure 1-2 , a pipeline panorama detection robot, comprising a fuselage 11, the left end of the fuselage 11 is fixedly provided with a rotating shooting mechanism 15, the rotating shooting mechanism 15 includes two image acquisition cameras 1 and a rotary table 2, the image acquisition camera 1 adopts the prior art, Without going into details, shooting and detection can be carried out. The rotary table 2 is fixedly installed on the body 11, and the two image acquisition cameras 1 are symmetrically fixed on the rotary table 2. The first stepping motor is fixedly installed in the rotary table 2. The first step The feeder motor can drive the rotary table 2 to rotate, thereby driving the two image acquisition cameras 1 to rotate, to photograph the internal conditions of the pipeline, and to perform panoramic detection.
[0025] Wherein, the left and right sides of the fuselage 11 are symmetrically fixed with a support mechanism 16, the support mechanism 16 include...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More