

Rolling bearing fault feature extraction method based on IITD and AMCKD
A rolling bearing and fault feature technology, applied in the field of fault diagnosis technology and signal processing analysis, can solve the problems of high endpoint effect index, distortion, and difficulty in extracting fault feature information.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
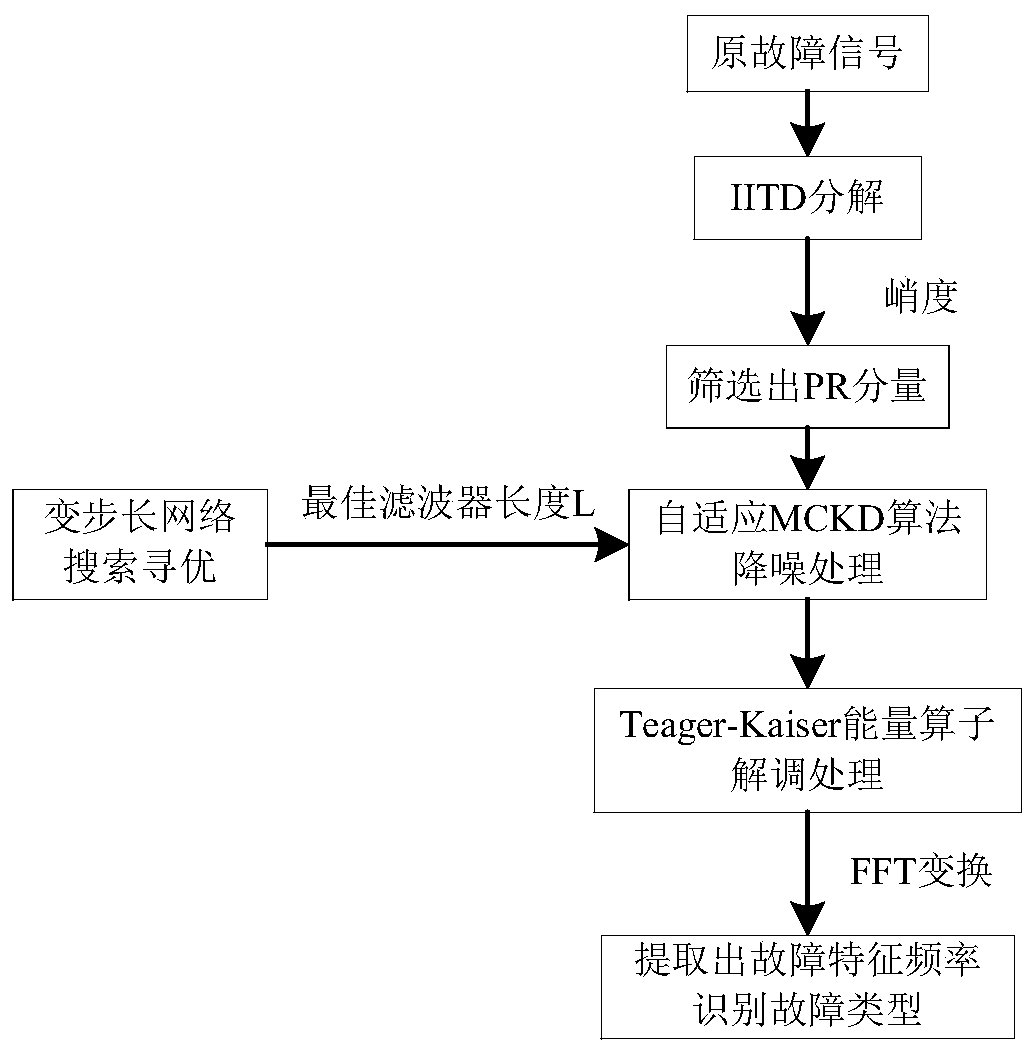
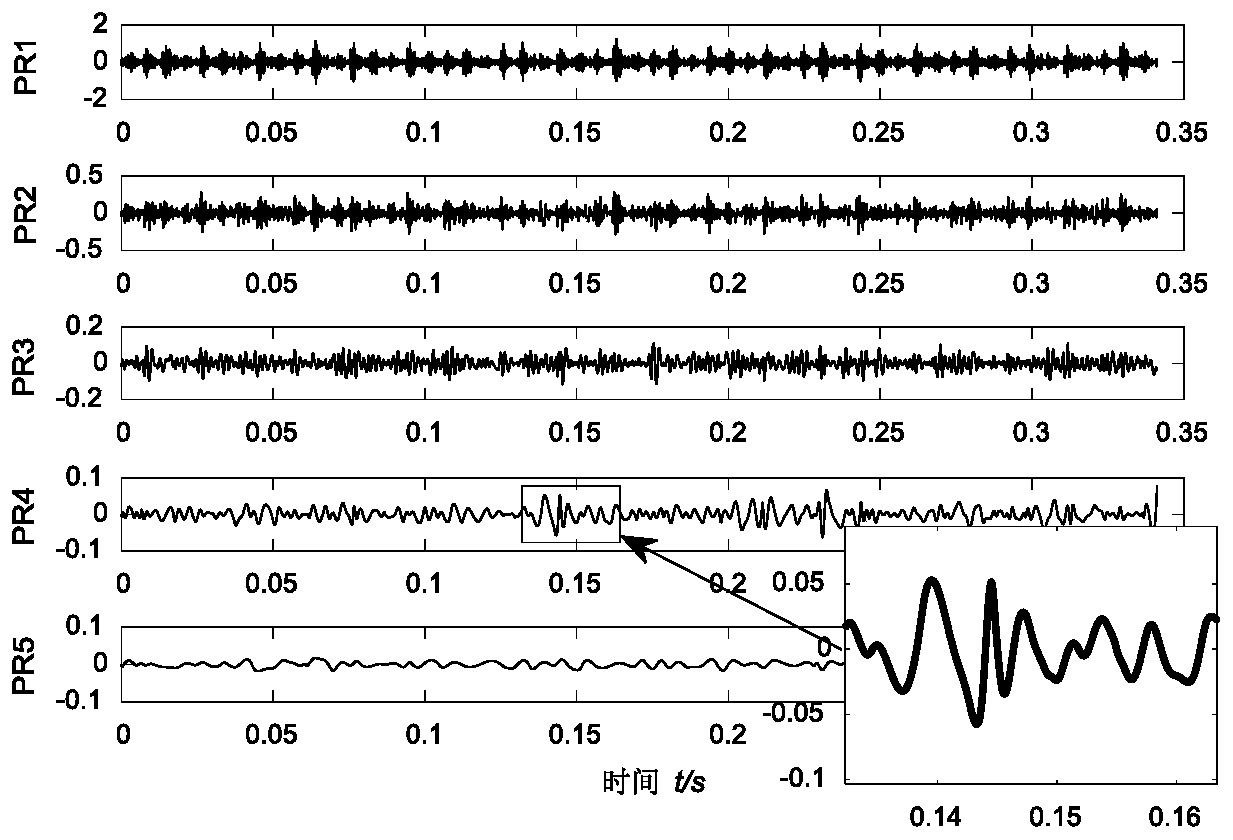
[0071] Embodiment 1: as figure 1 As shown, a rolling bearing fault feature extraction method based on IITD and AMCKD, first use the IITD method to analyze the rolling bearing vibration signal X t Decompose to obtain a series of PR components; then use the cross-correlation coefficient or kurtosis criterion to filter the PR components that contain rich fault information for reconstruction, and perform AMCKD noise reduction processing on the reconstructed signal M(t); then use Teager -Kaiser Energy Operator (Teager-Kaiser Energy Operator, TKEO) demodulates the denoised signal H(t); finally performs fast Fourier FFT transform on the demodulated signal W(t), and analyzes the transformation According to the spectrum characteristics of the final signal Y(t), the characteristic frequency of the rolling bearing fault is extracted.
[0072] The specific steps of the method are as follows:
[0073] (1) Firstly, IITD decomposition is performed on the vibration signal of the rolling bea...
Embodiment 2
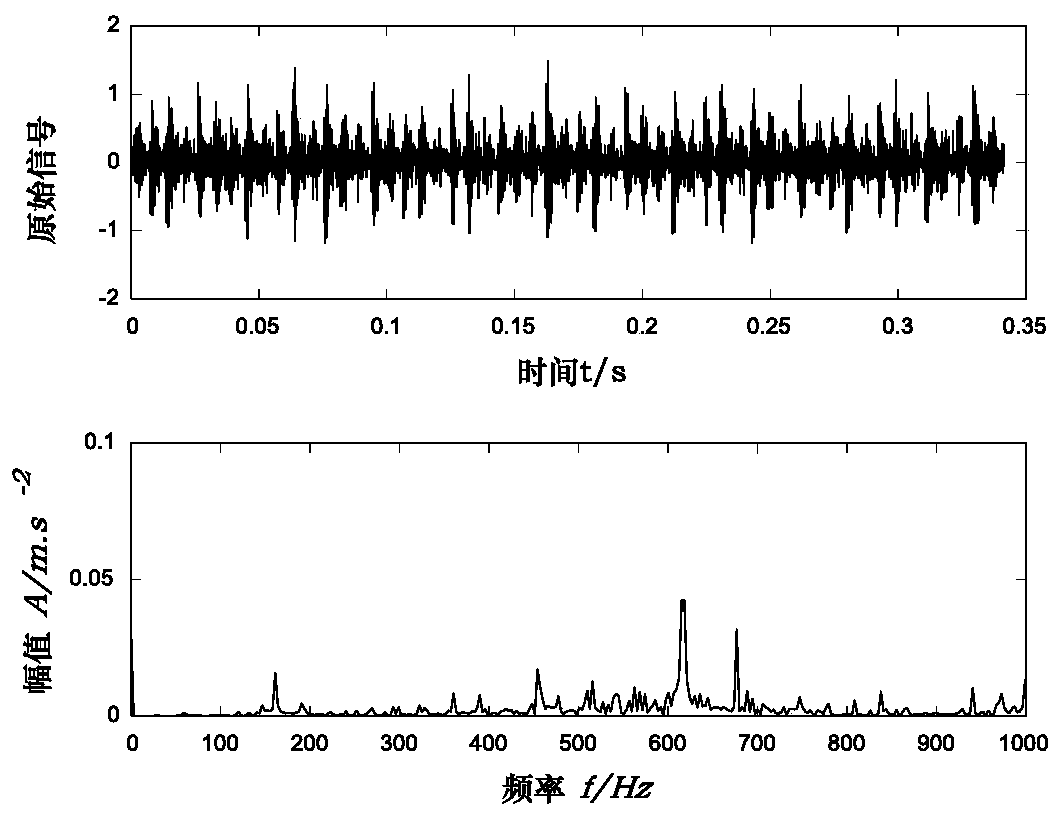
[0112] Example 2: This example uses the experimental data of the inner and outer rings of the rolling bearing in the electrical engineering laboratory of Case Western Reserve University in the United States as the data source for verification and analysis. The rolling bearing model of the experimental platform is 6205-2RS JEM SKF, and the specific bearing parameters are shown in Table 1. shown. The data collected for the experiment was collected by an accelerometer attached to the housing with a magnetic base. The accelerometers are placed at the 12 o'clock position on the drive end and fan end of the motor housing. The diameter of the bearing damage fault crack is 0.1778mm, and the crack depth is 0.2794mm. Load 2.237kW, frequency f z =2000r / min, the sampling frequency is 12kHz, and the number of sampling points is 4096. According to theoretical calculation, when there is a fault in the inner ring of the bearing, the fault fundamental frequency is 156.14Hz.
[0113] Bearin...
Embodiment 3
[0125] Embodiment 3: This example uses the method of the present invention to carry out experiments on rolling early weak faults, and uses the bearing fault data of the intelligent maintenance system of the University of Cincinnati (University of Cincinnati) disclosed by NASA to carry out experiments. The four bearings are driven by the motor, and the rotation speed of the bearings is f z =2000r / min, four double-row concave roller bearings of the type Rexnord ZA-2115 are installed on the horizontal shaft, and the specific parameters of the bearings are shown in Table 3. An acceleration sensor with a model number of PCB 353B33 is installed on each bearing to measure vibration signal data. The sampling frequency is 20kHz, and the number of sampling points is 20480. The data in the file "2nd_test" is to collect the vibration data of bearing 1 from normal operation to failure until the end of the failure experiment. The test platform has been running for nearly 7 days, and the ou...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More