

Multi-AGV scheduling method based on petri network decomposition
A scheduling method and technology for scheduling networks, which can be used in instruments, data processing applications, forecasting, etc., and can solve problems such as low operating efficiency, low response speed and low adaptability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0066] The present invention will be further described below in conjunction with the accompanying drawings.
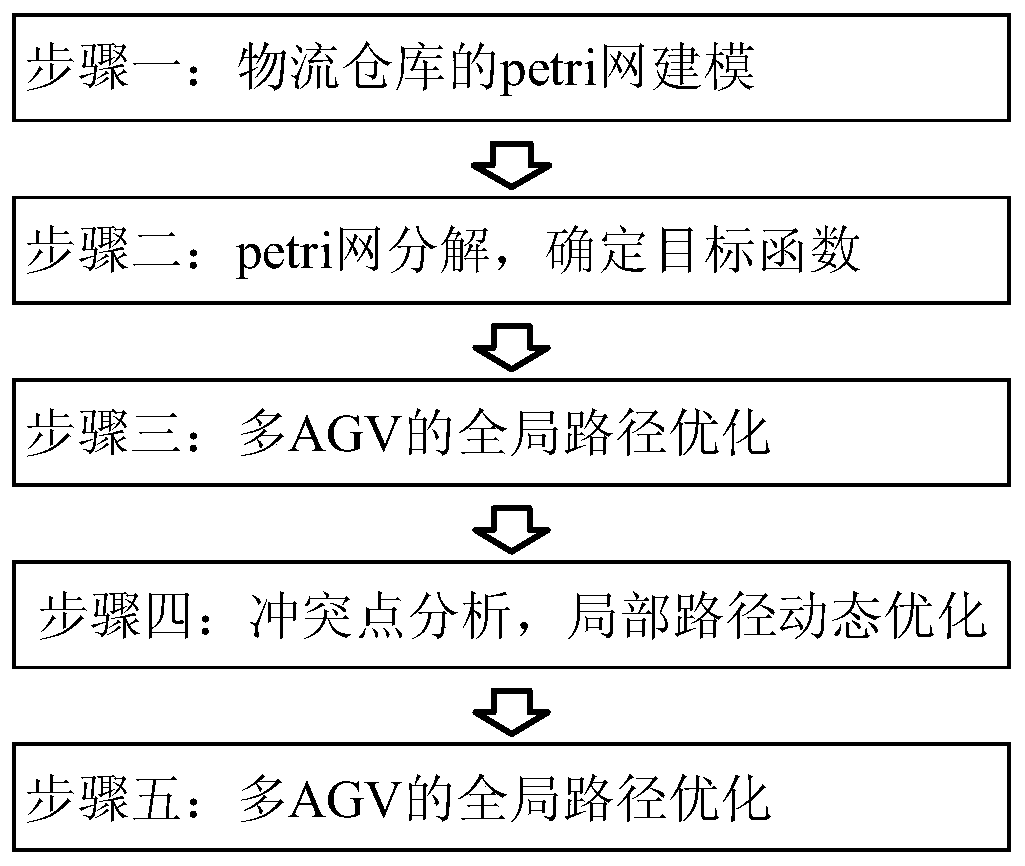
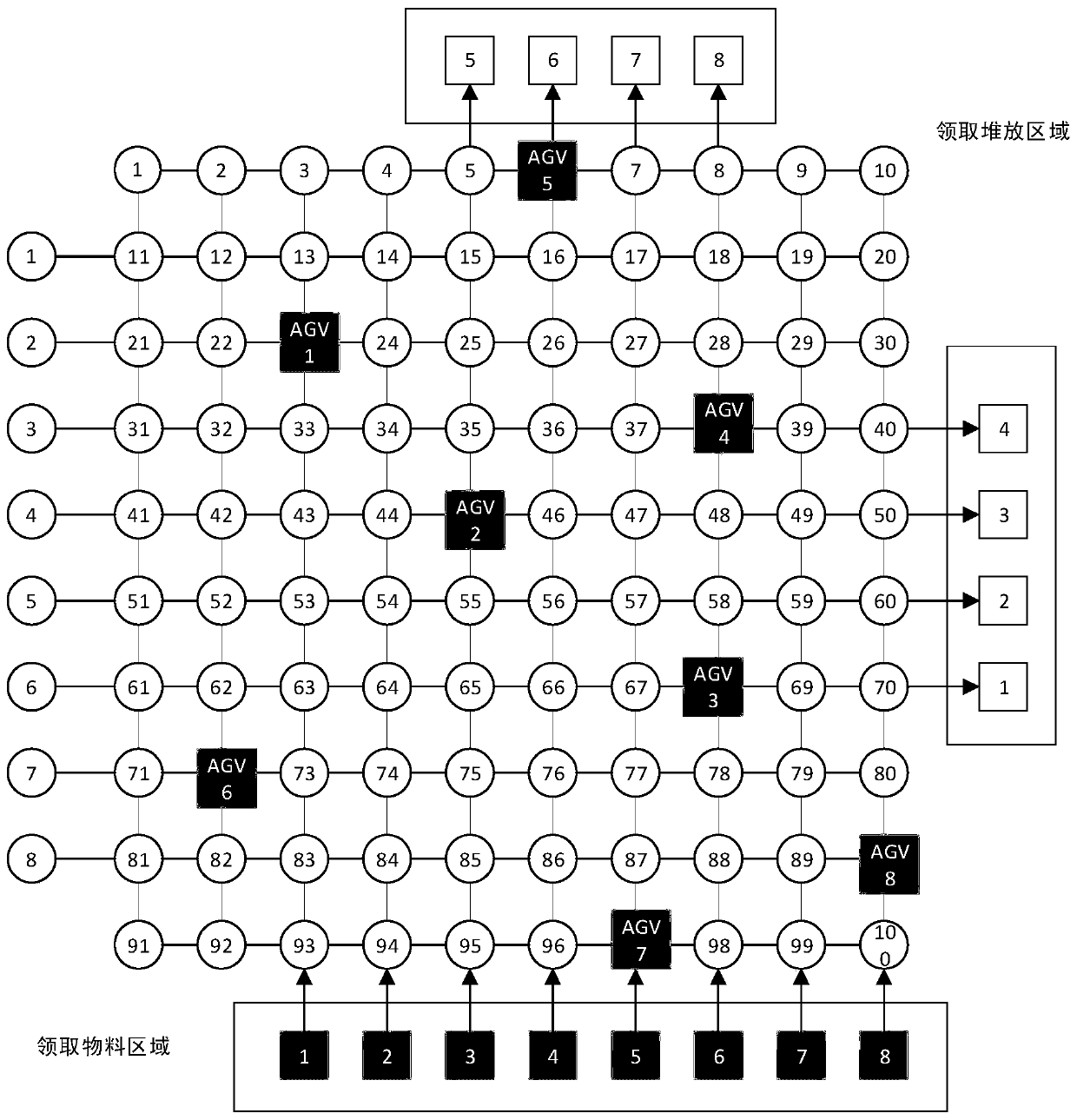
[0067] refer to figure 1 and figure 2 , a multi-AGV scheduling method based on petri net decomposition, comprising the following steps:
[0068] Step 1: Build an environment map to form a dispatching network model in a multi-AGV environment. The process is as follows:
[0069] 1.1: In the logistics warehouse, the AGV runs according to the pre-specified route (including one-way trajectory and two-way trajectory). First, consider the map modeling of the entire environment in which the AGV operates. The establishment of the multi-AGV warehouse scheduling environment model adopts discrete The two-dimensional directed graph is used to model the network, and the basic two-dimensional directed graph G=(V, E) is used to represent the warehouse structure. V represents the collection of warehouse nodes. On the nodes, the AGV can stop or turn , E represents the collection of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More