

Pneumatic soft mechanical hand with touch sensing function
A tactile perception, manipulator technology, applied in manipulators, manufacturing tools, chucks, etc., can solve the problems of easy deformation, lack of flexibility, low output force of soft manipulators, etc., to achieve the effect of improving safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The embodiments of the present invention are described in detail below in conjunction with the accompanying drawings. The following embodiments are implemented on the premise of the technical solutions of the present invention, and detailed implementation methods and specific operating procedures are provided, but the protection scope of the present invention is not limited to Examples described below.
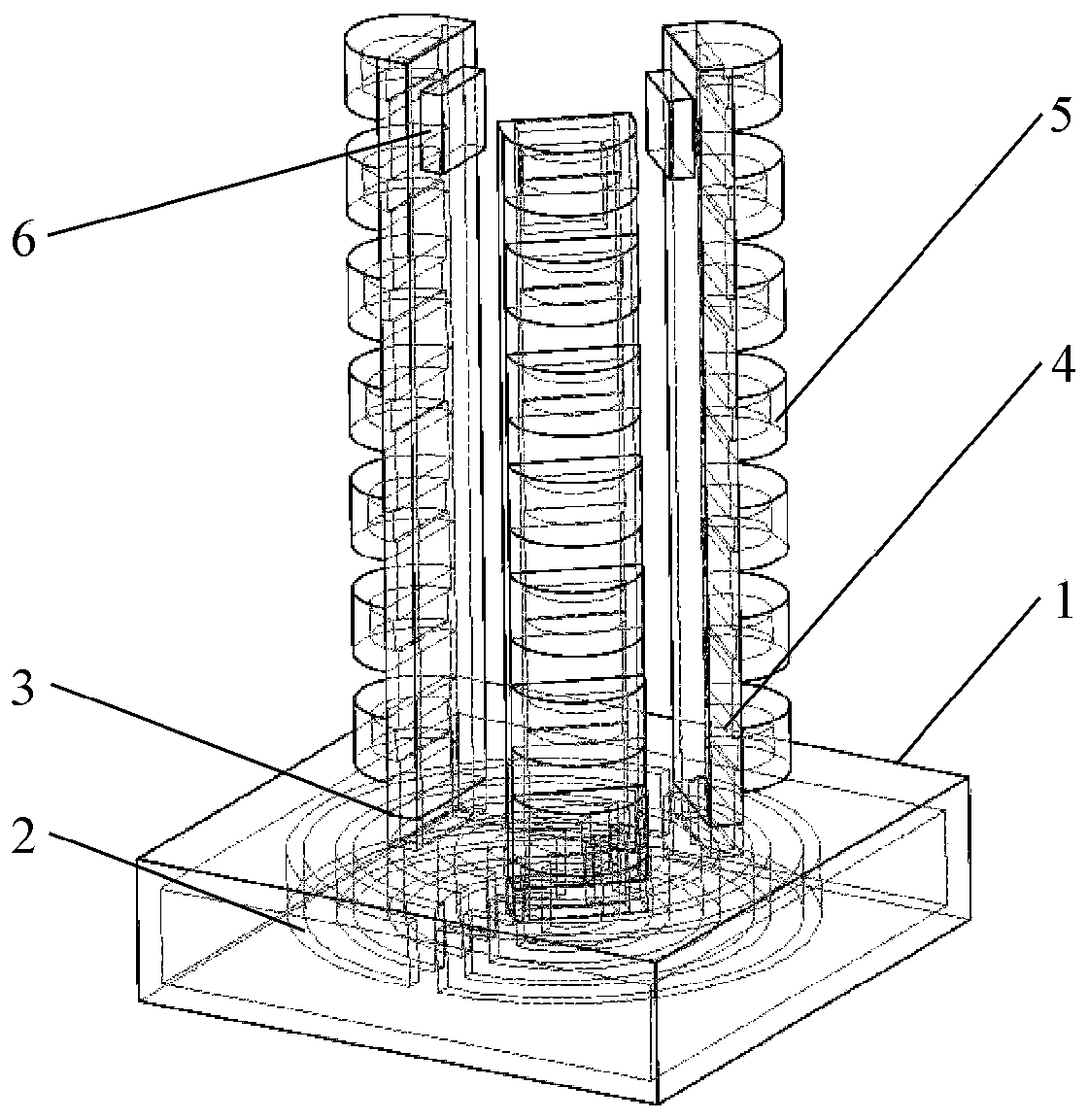
[0036] like Figure 1-7 As shown, the pneumatic soft manipulator with tactile sensing function in this embodiment is composed of three parts: an electrothermal phase change actuator, a soft manipulator and a flexible tactile sensing unit.
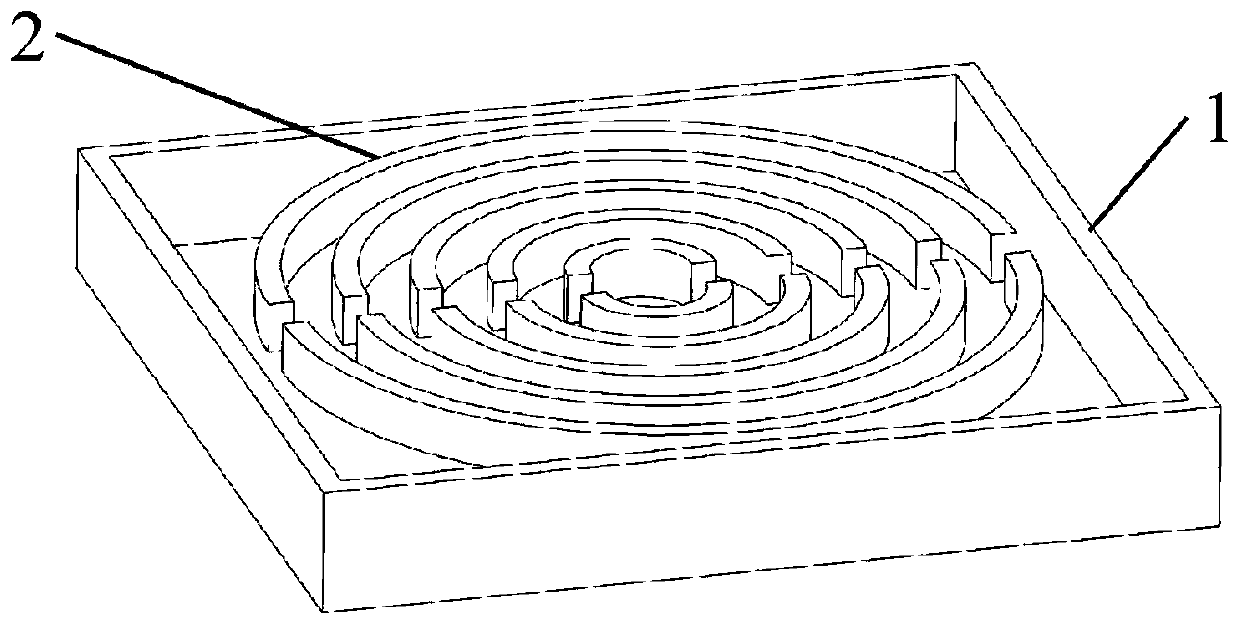
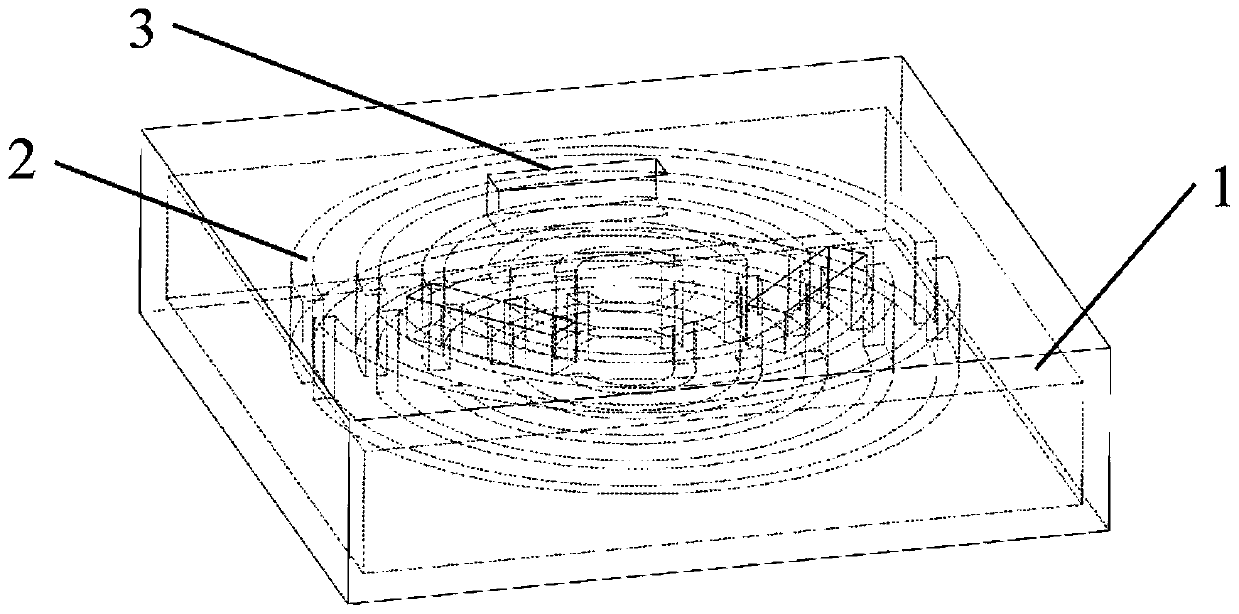
[0037] like figure 2 , 3 As shown, the electrothermal phase change actuator includes a matrix 1 with a cavity inside; two groups of symmetrically distributed flexible heating films 2 are fixed on the bottom surface of the inner cavity of the matrix 1, and each group of flexible heating films includes several equidistantly arranged...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More