

Rehabilitation robot control method based on joint stiffness and muscle fatigue
A technology for rehabilitation robots and muscle fatigue, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve problems such as implementation difficulties, ignoring the influence of joints, and potential safety hazards
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0090] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
[0091] Combine below Figure 1 to Figure 4 , taking the ankle flexion and extension action as an example, the specific implementation mode of the present invention is introduced as follows:
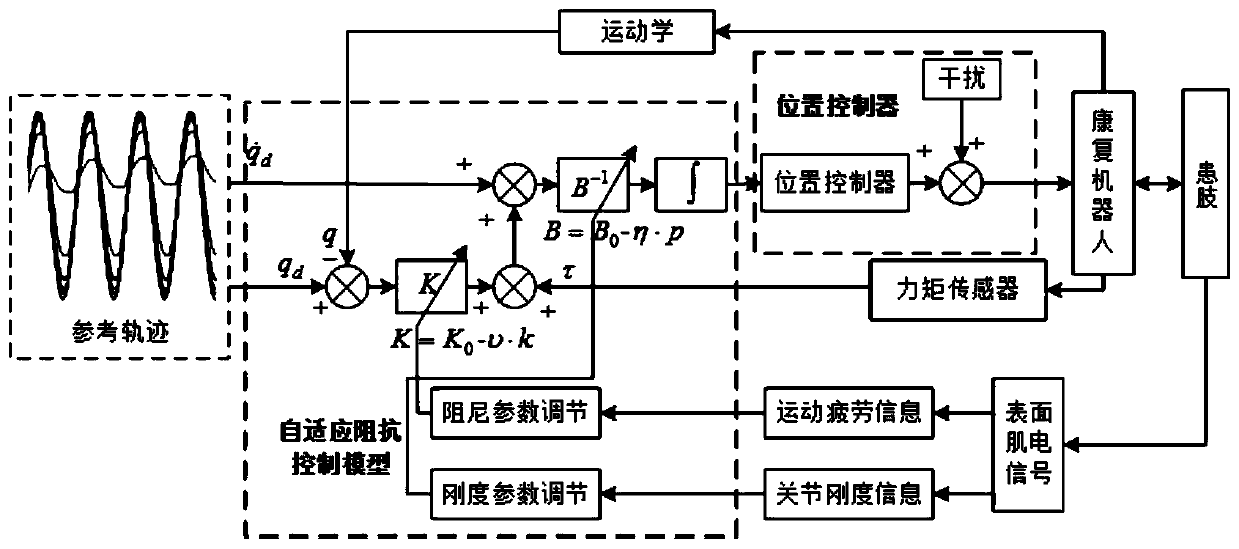
[0092] combine figure 1 , the self-adaptive impedance control method for ankle rehabilitation robot based on stiffness estimation and fatigue feedback of the present invention adopts a position-based impedance model, first sets a reference trajectory, collects surface el...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More