LiDAR-Camera Joint Calibration Target and Joint Calibration Method
A laser radar and joint calibration technology, applied in the direction of radio wave measurement systems, instruments, etc., can solve the problems of not getting distance values at the edge and low angular resolution, and achieve simple structure, low production cost, and save calibration costs Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
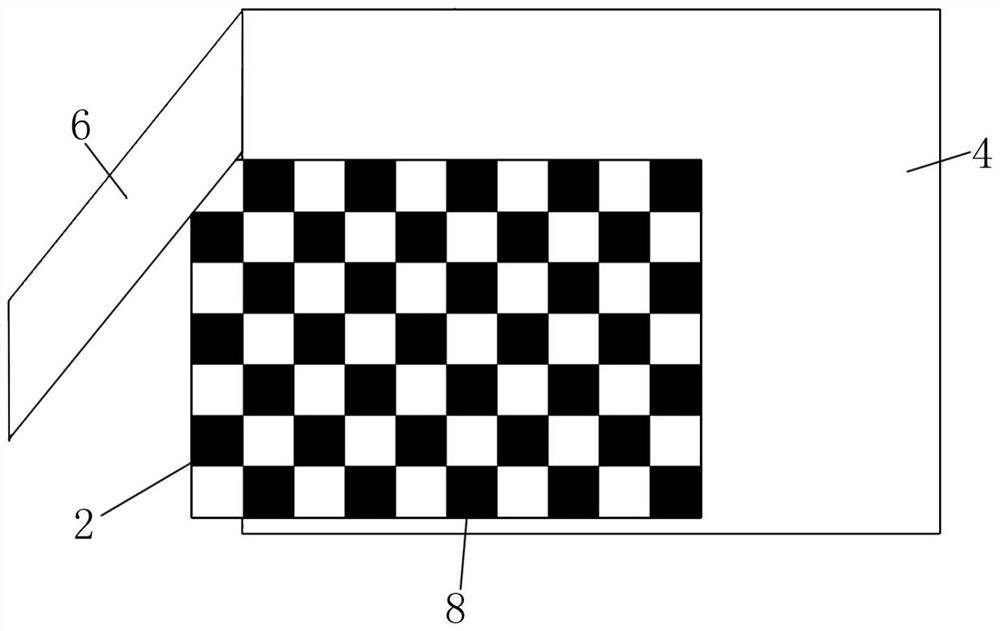
[0036] This embodiment discloses a lidar-camera joint calibration target, refer to figure 1 As shown, the joint calibration target includes a checkerboard calibration board 2 and an "L"-shaped calibration board; the above-mentioned "L"-shaped calibration board includes a first plane vertical board 4 and a second plane vertical board 6, and the above-mentioned second plane vertical board 6 is opposite Fix on the first plane riser 4 after the first plane riser 4 turns 90°; the above-mentioned checkerboard marking plate 2 is parallel to the first plane riser 4, and is fixed on the front side of the line of sight of the first plane riser 4 A black and white checkerboard pattern 8 is arranged on the above-mentioned checkerboard calibration board 2 on a plane vertical board 4 .
[0037] The joint calibration target of the above structure, the checkerboard calibration plate 2 is a flat plate structure, and the black and white checkerboard pattern 8 is regularly arranged on it; in the...
Embodiment 2
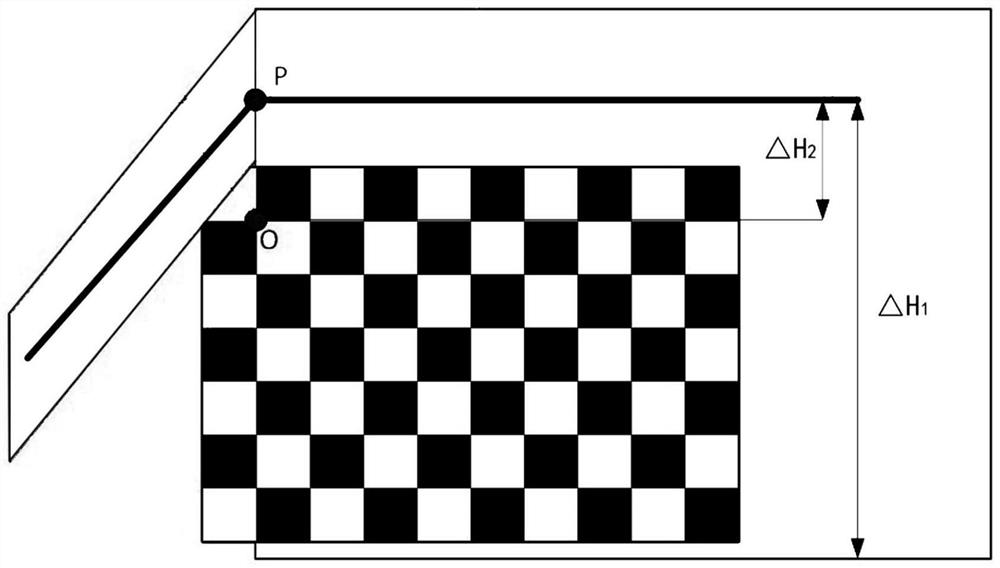
[0041] This embodiment discloses a lidar-camera joint calibration method. The joint calibration target disclosed in Embodiment 1 is used for joint calibration of the lidar-camera. The calibration target is placed within the field of view of the two cameras of the two cameras, and placed At a distance of about 2 meters from the lidar (the ranging range of the lidar is 4 meters). Here, the internal parameters of the camera have been calibrated using methods in the prior art.
[0042] The joint calibration method includes the following specific steps:
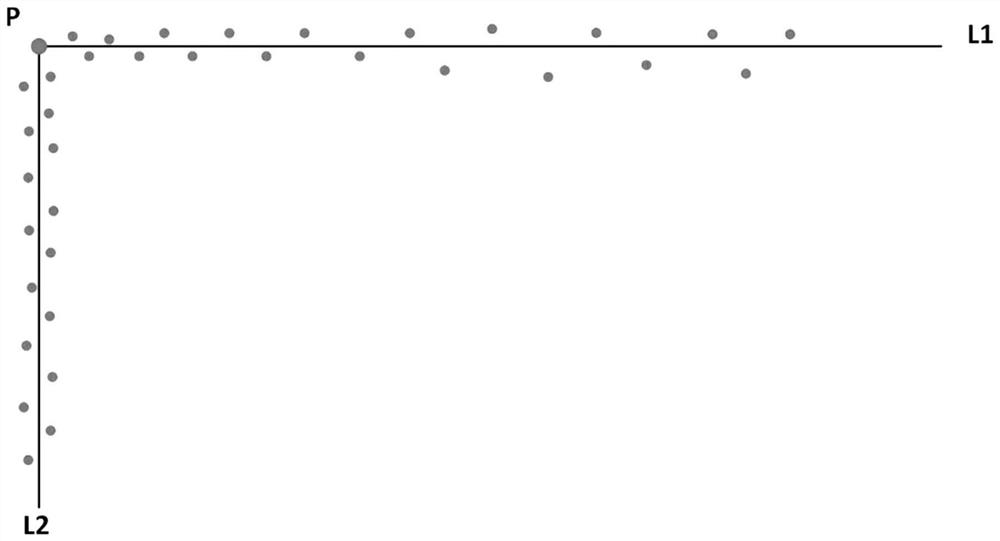
[0043] (1) The laser radar scans the "L"-shaped calibration plate to obtain the relative positional relationship between the laser radar and the "L"-shaped calibration plate [R 1 , T 1 ].
[0044] The specific implementation process of this step is as follows:
[0045] S1, the laser radar continuously scans the first plane riser 4 and the second plane riser 6, and can scan continuously from the first plane riser 4 to the secon...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com