

An unmanned aerial vehicle self-starting system and its control method
A control method and unmanned aerial vehicle technology, applied in the direction of power plant, aircraft parts, transportation and packaging, etc. Improved safety and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
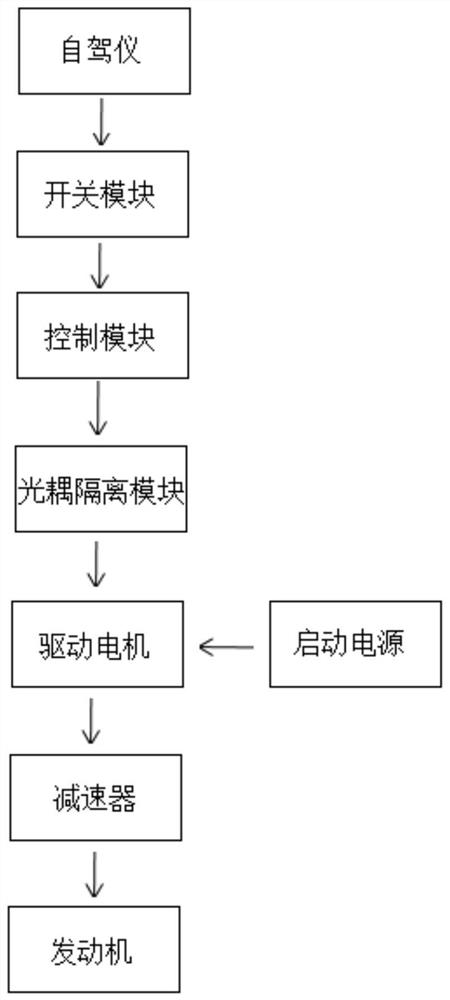
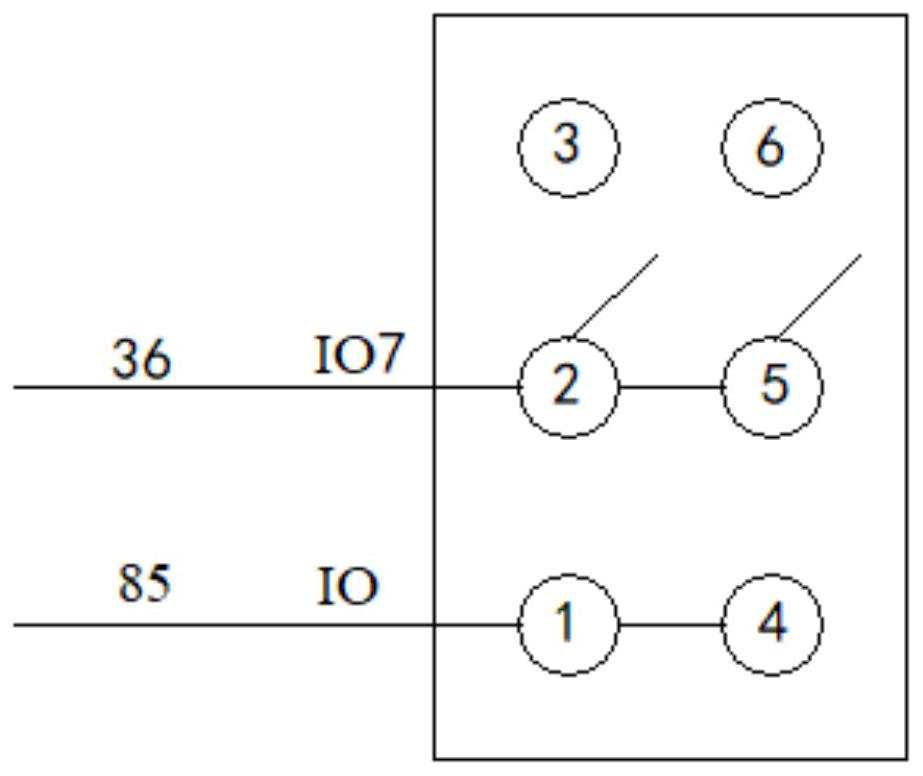
[0051] Turn on the switch module before the UAV is about to take off, and the autopilot sends a start signal after receiving the start command sent by the ground station; figure 2 , the start signal is input from pin 1 of the button switch KN6A-202F, and the output is transmitted from pin 2 to the control module. The control module selects STM32F103C8T6, the start signal is input from pin 17, and the control module judges whether it is continuously received within 2s Two start signals, if received, the start signal will be output from pin 30. There are two sets of MOS tubes in the drive motor. The drive motor receives the start signal and enables to open the two sets of MOS tubes, so that the drive motor is connected to the start power supply. The drive motor then drives the engine through the reducer to start.
Embodiment 2
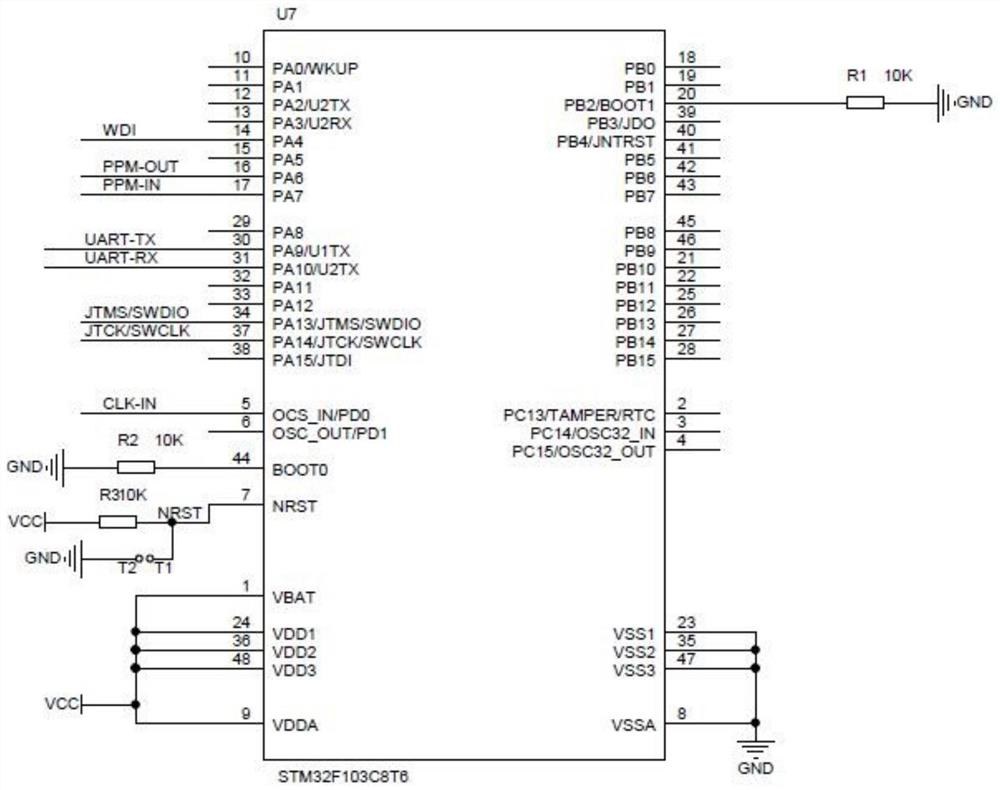
[0053] There is a Hall speed sensor in the autopilot. Turn on the switch module before the drone takes off. The preset start signal triggers the command in the autopilot. When the trigger condition is met, that is, when the Hall speed sensor detects that the transmitter speed is less than 100RPM, The autopilot sends a start signal through the signal line; figure 2 , the start signal is input from pin 1 of the button switch KN6A-202F, and output from pin 2 to the control module; for example image 3 , the control module selects STM32F103C8T6, the start signal is input from U7 pin 17, and the control module judges whether the start signal is received three times continuously within 3s, and if received, the start signal is output from pin 30. like Figure 4 , the start signal is sent to the optocoupler isolation module N1 pin 2, when there is no start signal input, IO is high level, the internal diode of N1 is not conducted, the signal is cut off, and the engine does not work; ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More