

Dynamic calibration equipment for six-dimensional force sensor and loading method of dynamic calibration equipment
A six-dimensional force sensor and dynamic calibration technology, applied in the field of sensor testing, can solve the problems of high risk factor, low operation accuracy, large error, etc., and achieve the effect of small forward and reverse clearance, high self-precision, and small footprint
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
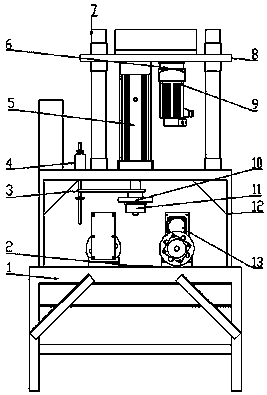
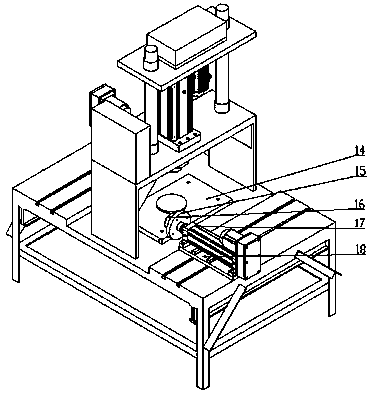
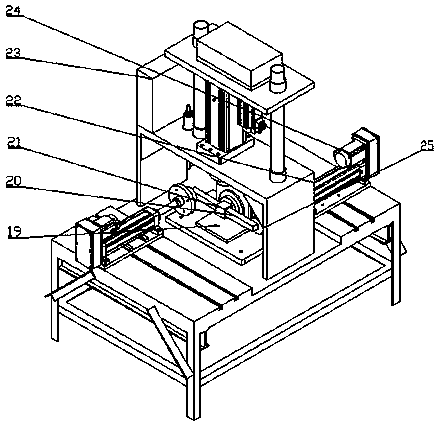
[0019] Such as Figure 1 to Figure 3 As shown, it includes the lower bed 1, the sensor to be tested 2, the connecting plate 3, the displacement sensor 4, the electric cylinder 5, the reducer 6, the column 7, the bearing plate 8, the servo motor 9, the joint 10, the upper bed 11, the standard Sensor 12, servo motor 13, working plate 14, joint 15, standard sensor 16, electric cylinder 17, fixed plate 18, vertical plate 19, loading column 20, chuck 21, electric cylinder 22, PLC control box 23, servo motor 24 , standard sensor 25.
[0020] The lower bed 1 is welded by a steel plate and an angle steel, two I-shaped steels are welded under the steel plate, and two angle steels are welded at 45 degrees before and after the lower bed 1 to reduce the deformation of the lower bed 1. The end is welded steel plate, and two grooves are arranged on the steel plate, in order to fix the fixed plate 18;
[0021] The upper bed 11 is welded by steel plates, and 4 reinforcing ribs are welded be...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More