

Multi-AUV (Autonomous Underwater Vehicle) cooperative data collection algorithm based on Q-learning in UASNs (Unified Avian Service Networks)
A data collection and algorithm technology, applied in services based on specific environments, data exchange networks, digital transmission systems, etc., can solve problems such as big data collection delays, reduce energy consumption, allocate tasks reasonably and efficiently, and reduce cruise paths. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
[0048] A multi-AUV collaborative data collection algorithm based on Q-learning in UASNs, comprising the following steps:
[0049] Step 1: Node clustering
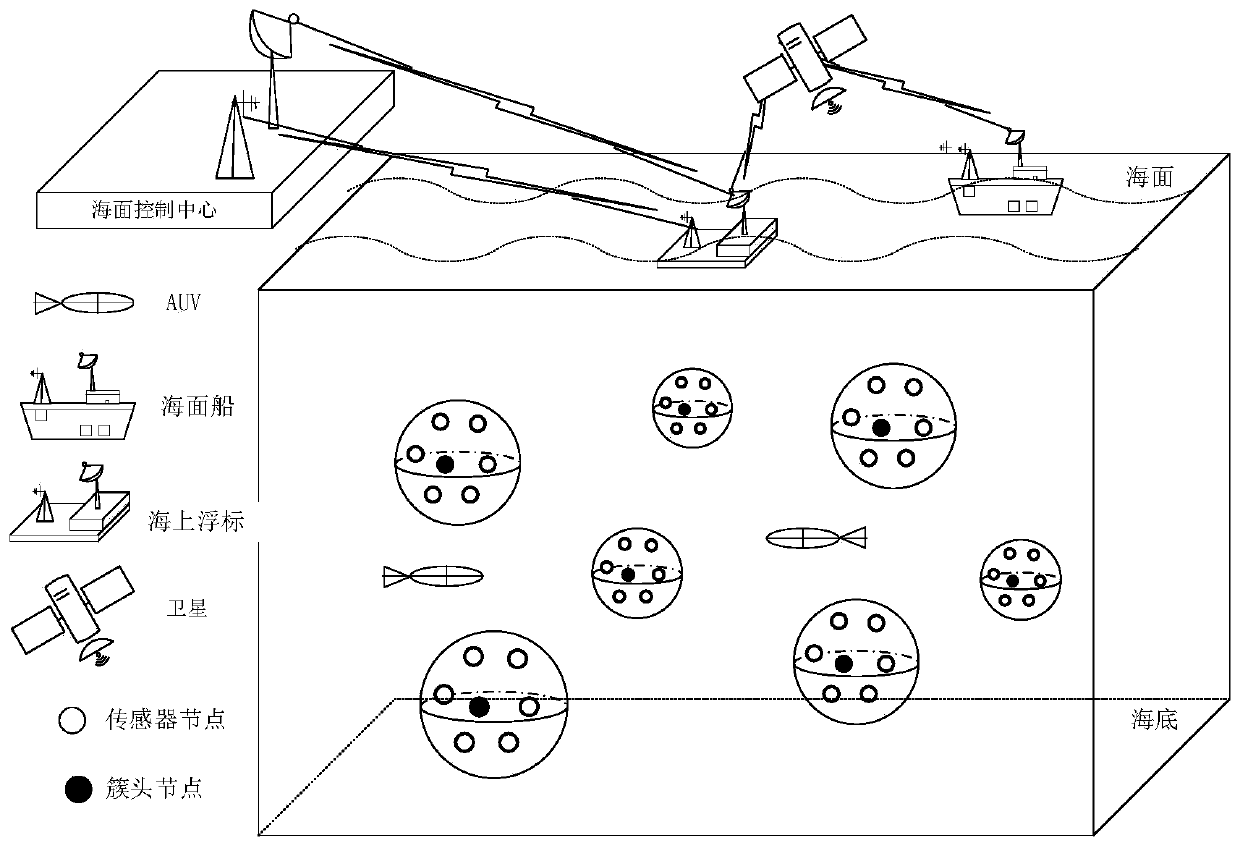
[0050] Such as figure 1 As shown, in the underwater wireless sensor network, the nodes are randomly deployed, and the cluster head nodes are selected from these nodes according to the selection rules, and are responsible for collecting and integrating the data of the nodes in the cluster; The nodes will receive declaration messages from different cluster heads, and the nodes that receive the message will send join messages to the nearest cluster head to join the nearest cluster head to form different node clusters;
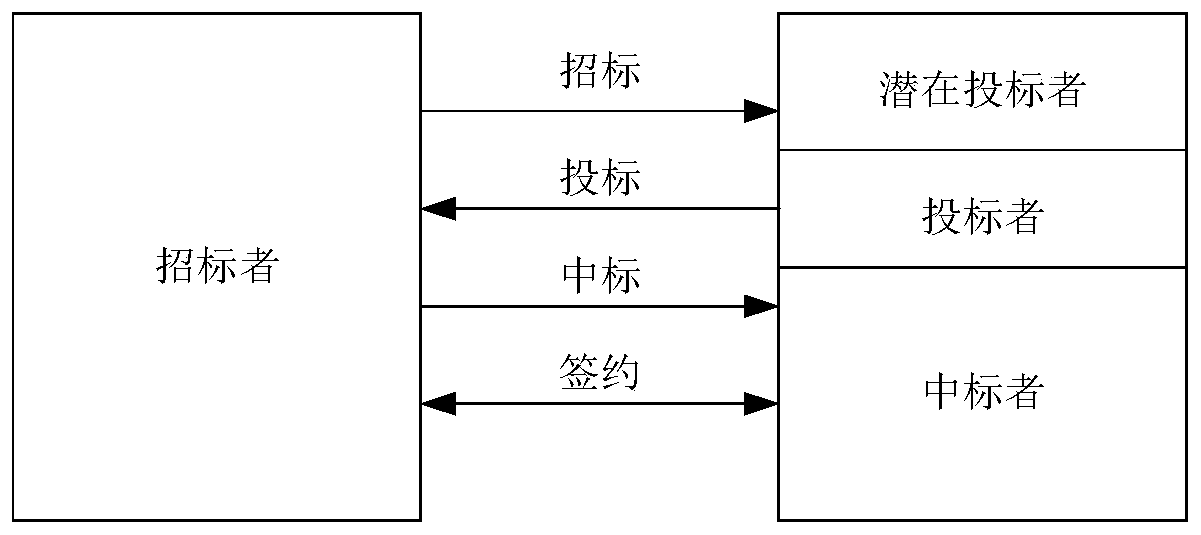
[0051] Step 2: AUV task assignment
[0052] Such as figure 2 As shown, after the clustering of the nodes is completed, each cluster is regarded as a collection task; in the bidding ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More