

Deployable, implantable microcyst endoscopic robot with telescopic arms
A robot and telescopic arm technology, applied in the field of medical devices, to achieve the effect of expanding the prostate and removing stones
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
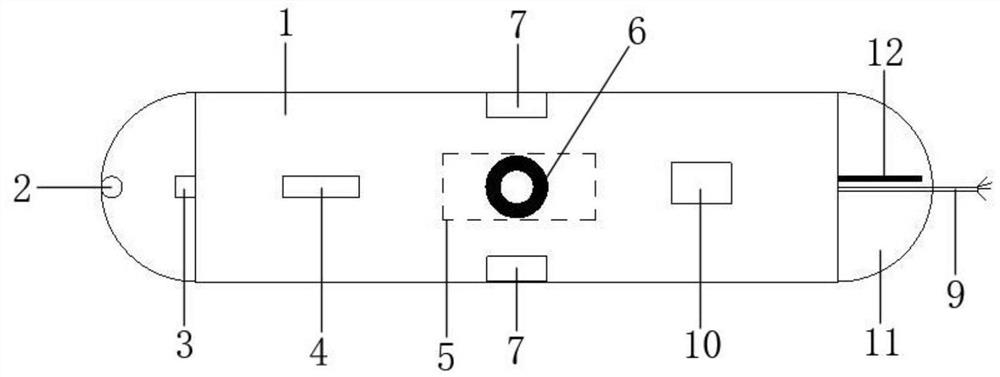
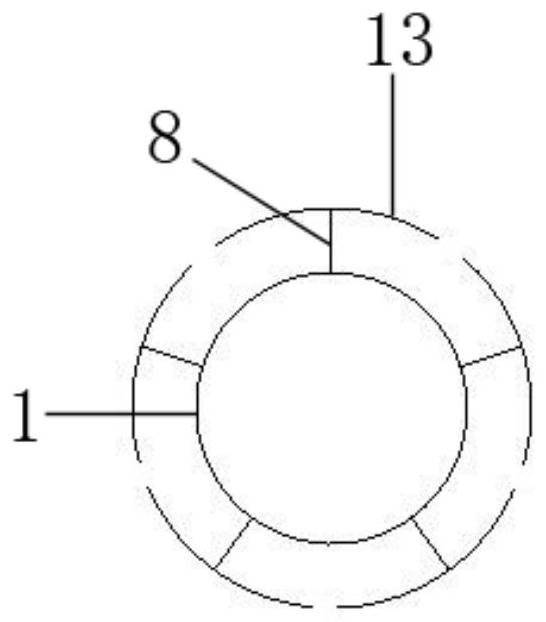
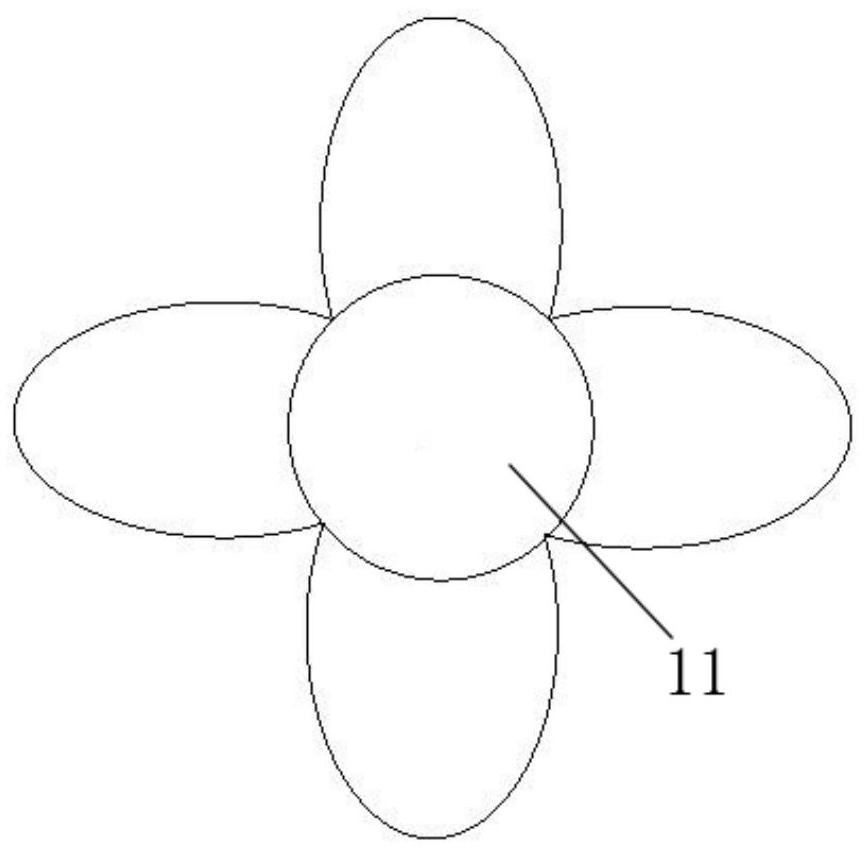
[0036] Please see attached figure 1 , figure 1 It is a schematic structural diagram of a microcystoscopy robot that can be deployed, has a telescopic arm and can be colonized according to the present invention. A deployable, with a telescopic arm, a miniature cystoscopy robot that can be colonized, the miniature cystoscopy robot comprises a robot body 1, a camera 2, a lighting device 3, a wireless charging device 4, a wireless induction coil 5, The electronic chip 6, the groove 7, the mechanical arm 8, the mechanical foot 9, the power device 10, the petal structure 11, and the probe 12; the robot body 1 has a cylindrical structure, and both ends have a hemispherical structure; the The surface of the robot body 1 is completely fitted by the five allegro plate 13, and is controlled by the robot body 1; the camera 2 is arranged at the apex of the hemispherical structure at the front end of the robot body 1; the camera lighting device 3 is arranged on the robot body 1 The centra...
Embodiment 2
[0039] This embodiment is basically the same as Embodiment 1, the difference lies in that the surface of the mechanical foot 9 or the mechanical arm 8 in this embodiment is provided with developing points (not shown in the figure); the design using the developing points , which is convenient for the robot body to be placed in the designated position inside the bladder.
[0040] The present invention is a microcystoscopy robot that can be deployed, has a telescopic arm, and can be planted. By utilizing the design of the camera at the vertex of the hemispherical structure at the front end of the robot body and the lighting device at the middle position of the front end of the robot body, the condition in the bladder can be continuously monitored. , can detect early stones, abnormal tissue, bleeding and other phenomena in time, and provide great help for further treatment; the surface of the robot body can be moved to the urethra and prostate through the design of five completely ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More