

Artificial finger inflation software three-finger clamping device
A gripper and software technology, applied in the field of human-finger inflatable soft three-finger grippers, can solve problems such as poor load capacity of soft grippers and poor stability of gripped objects, so as to improve stability and use effect , Enhance the effect of load capacity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach
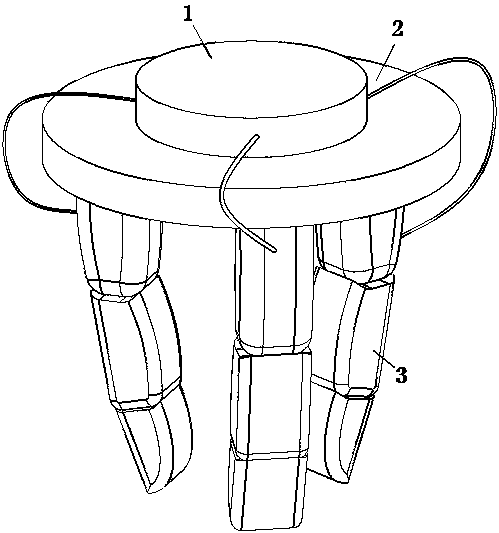
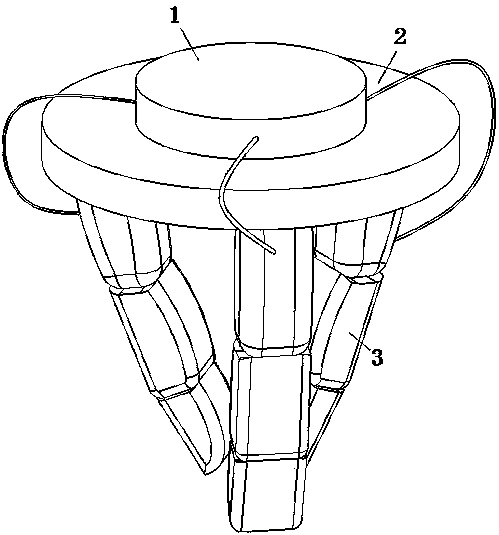
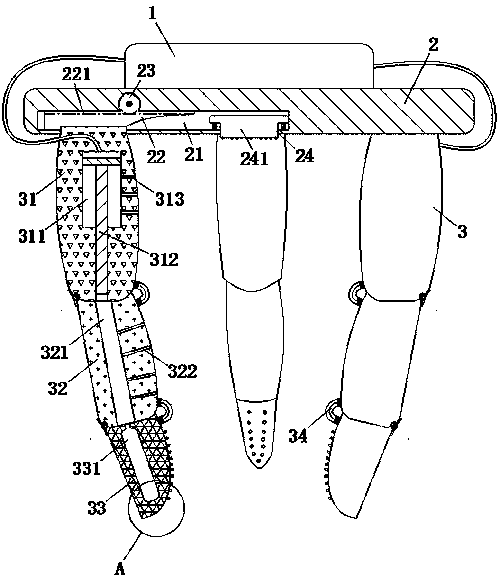
[0021] As an embodiment of the present invention, the first joint 31 has a No. 1 hole 313 on the side wall close to the article, and the No. 1 hole 313 communicates with the No. 1 cavity 311; The side wall of the article has a second hole 322, and the second hole 322 communicates with the second cavity 321; through the cooperation of the first cavity 311, the second cavity 321, the first hole 313 and the second hole 322 In the process of clamping the item, the side wall of the bionic finger 3 can generate adsorption force on the item, thereby enhancing the use effect of the clamper; when working, when the bionic finger 3 is in the open state, the clamper is located above the item When the controller 1 releases the pressure on the first cavity 311 through the hose, the second joint 32 and the third joint 33 will be bent under the torsion force of the torsion spring, and the piston rod 312 will be squeezed and retracted again. In the cavity 311, the bionic finger 3 resumes the c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More