

A method of adjusting hand lever based on dynamic positioning system
A dynamic positioning system and dynamic positioning technology, which are applied in the directions of propulsion engine, complex mathematical operation, ship construction, etc., can solve the problems of not explaining the conversion process and algorithm of the hand lever, and not involving the intelligent adjustment of customized input and output characteristics. , to meet the needs of ship control, high practical value, and eliminate the effect of zero drift
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] Embodiments of the present invention are described in further detail below in conjunction with the accompanying drawings:
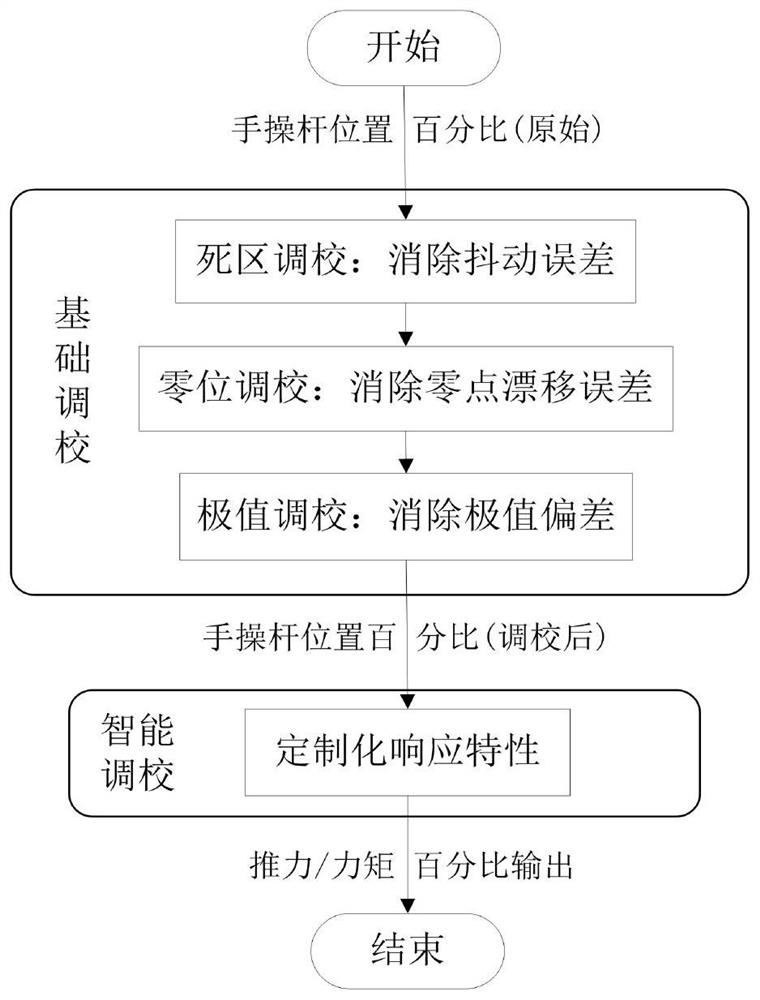
[0044] A kind of adjustment method of hand lever based on dynamic positioning system, such as figure 1 shown, including the following steps:
[0045] Step 1. Before the dynamic positioning hand lever is used, the basic adjustment and calibration of the hand lever is required;
[0046] In this embodiment, the basic adjustment and calibration items in step 1 include three dimensions: horizontal, vertical, and heading, and each dimension involves four items of minimum value, zero position, maximum value, and dead zone, totaling ten Two calibration values, all calibration values are in percentage form.
[0047] The concrete steps of described step 1 include:
[0048] (1) Move the hand lever to its mechanical zero position (horizontal, longitudinal and heading three dimensions must be at its mechanical zero position), record the original position inf...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More