

Calibration-target-free universal hand-eye calibration method based on 3D vision
A technology of hand-eye calibration and calibration board, which is applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., which can solve the problems of inconvenient, inability to achieve online calibration, and inability to carry calibration boards
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
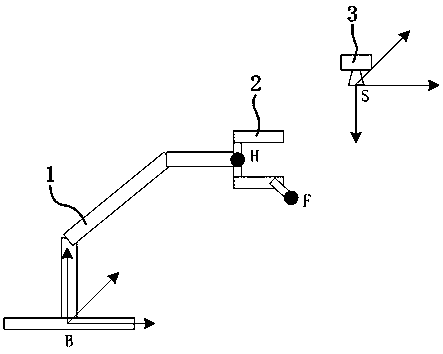
[0060] Example 1 - Eye-to-hand:
[0061] See figure 1 , in this implementation, the table tennis ball is clamped by the end effector of the robotic arm. The center of the table tennis ball is taken as the feature point F. There are at least two ways to extract the center position of the table tennis ball: first, use the depth image data of the 3D camera to perform Hough transform; second, segment the yellow circular area from the 2D image data, which is the closest to the camera Adding a radius of the ping-pong ball to the point along the camera depth direction is the center of the ball.
[0062] The specific steps of the general hand-eye calibration method based on 3D vision are as follows, including,
[0063] Step S1, keep the position of the center of the flange of the end effector of the mechanical arm unchanged, and control the end effector to only perform rotational movement. As far as the controller level of the manipulator is concerned, only the ABC Euler angles re...
Embodiment 2
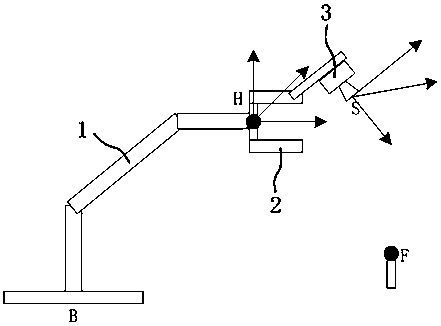
[0104] Example 2 - Eye-in-hand:
[0105] See figure 2 , the operation steps of the eye-in-hand calibration technique are basically the same as the above-mentioned embodiment, except that in step S2, the attitude of the recording robot arm is added, and the specific implementation methods are not described here one by one.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More