

Simulation method for motion control of changeable rotating center of dynamic positioning ship
A technology of rotation center and simulation method, which is applied in general control systems, control/regulation systems, instruments, etc., can solve the problems of not being able to find technical documents, and achieve the effect of reducing simulation errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
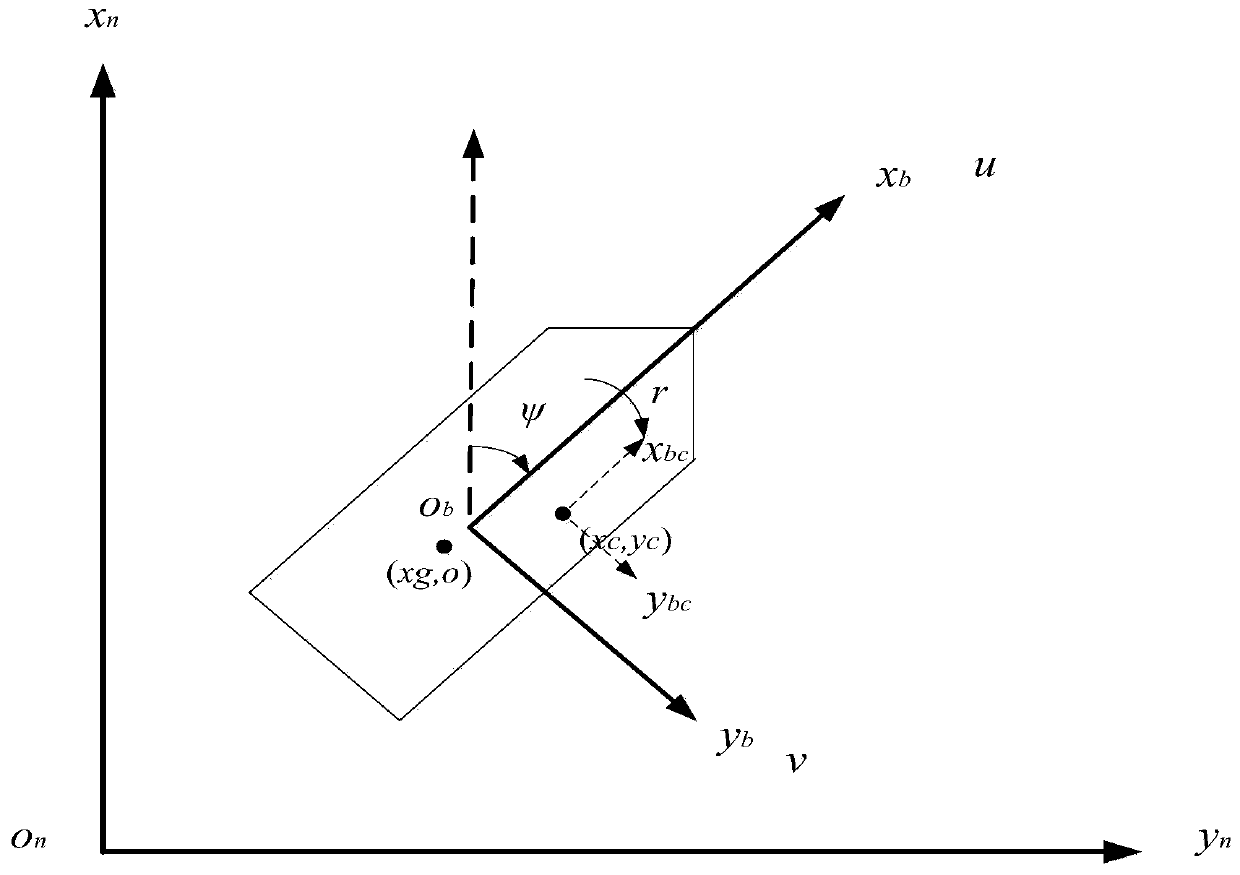
[0052] The invention aims at the motion control of the variable rotation center of the dynamic positioning ship, establishes a three-degree-of-freedom motion mathematical model of the variable rotation center of the ship, proposes a thrust sub-optimized mathematical model of the variable rotation center, and constructs a variable rotation center Dynamic positioning simulation system with central control function. The mathematical model of the ship's variable rotation center motion includes motion equations and dynamic equations. The kinematic equation of the variable rotation center is derived from the conventional three-degree-of-freedom motion equation of the ship according to the relationship between the position of the rotation center and the ship center. The dynamics equation of the ship's variable rotation center, the idea adopted in this patent is based on the composition characteristics of the ship's dynamics equation, the rigid body dynamics equation of the ship's var...
Embodiment 2
[0118] The motion control simulation steps of the dynamic positioning ship variable rotation center are as follows:
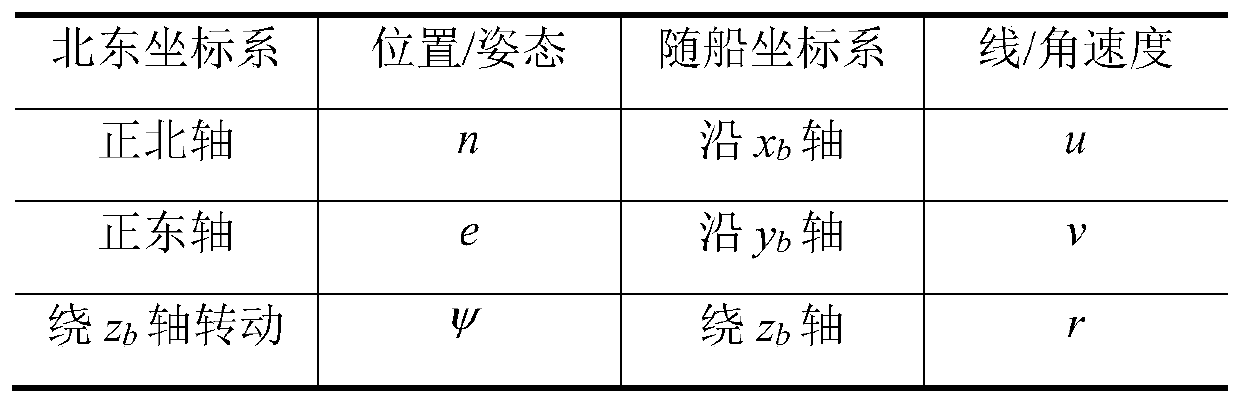
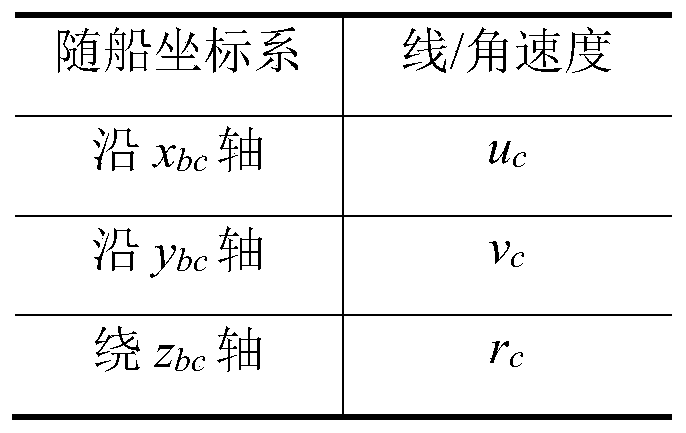
[0119] The first step is to set the rotation center point of the ship in the rotation center setting module according to the task requirements and the corresponding operation mode. The position of the rotation center point in the hull coordinate system is (x c ,y c ) are respectively transmitted to the three-degree-of-freedom motion mathematics module, the thrust distribution module and the motion state conversion module of the variable rotation center.
[0120] The second step is to determine the speed of the center of rotation of the ship and the switching matrix of the speed of the center of the ship according to the formula (2) based on the set center of rotation. According to the initial position, heading and three-degree-of-freedom speed of the ship (that is, the motion state of the center point of the hull), the initial position, heading and Three degr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More