

Artificial potential field method-based machine obstacle avoidance method and device
An artificial potential field method and artificial potential field technology, applied in two-dimensional position/channel control and other directions to achieve the effect of increasing the gravitational potential field
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0043] Embodiment 1 of the present application provides a machine obstacle avoidance method based on the artificial potential field method, which will be described in detail below with reference to the accompanying drawings.
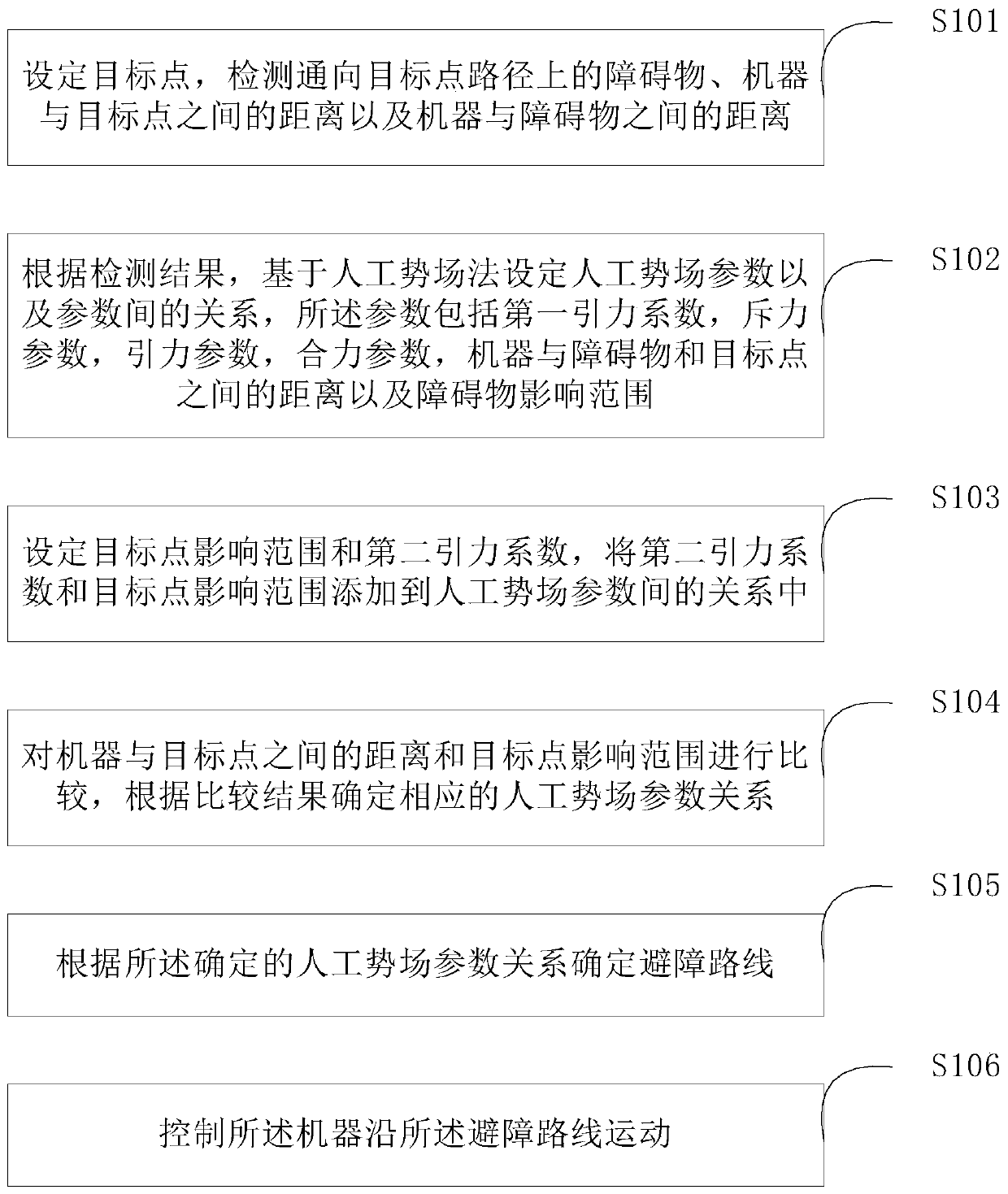
[0044] see figure 1 , which is a flow chart of the method for avoiding obstacles of a machine based on the artificial potential field method provided in Embodiment 1 of the present application.
[0045] The method described in Embodiment 1 of the present application includes the following steps:
[0046] Step S101: Set a target point, and detect obstacles on the path leading to the target point, the distance between the machine and the target point, and the distance between the machine and the obstacle.
[0047] Step S102: According to the detection results, set the parameters of the artificial potential field and the relationship between the parameters based on the artificial potential field method. The distance between them and the range of influence...
Embodiment 2
[0072] Based on the machine obstacle avoidance method based on the artificial potential field method provided in the above embodiments, Embodiment 2 of the present application also provides another example of an obstacle avoidance method based on the artificial potential field method, which will be described in detail below with reference to the accompanying drawings.
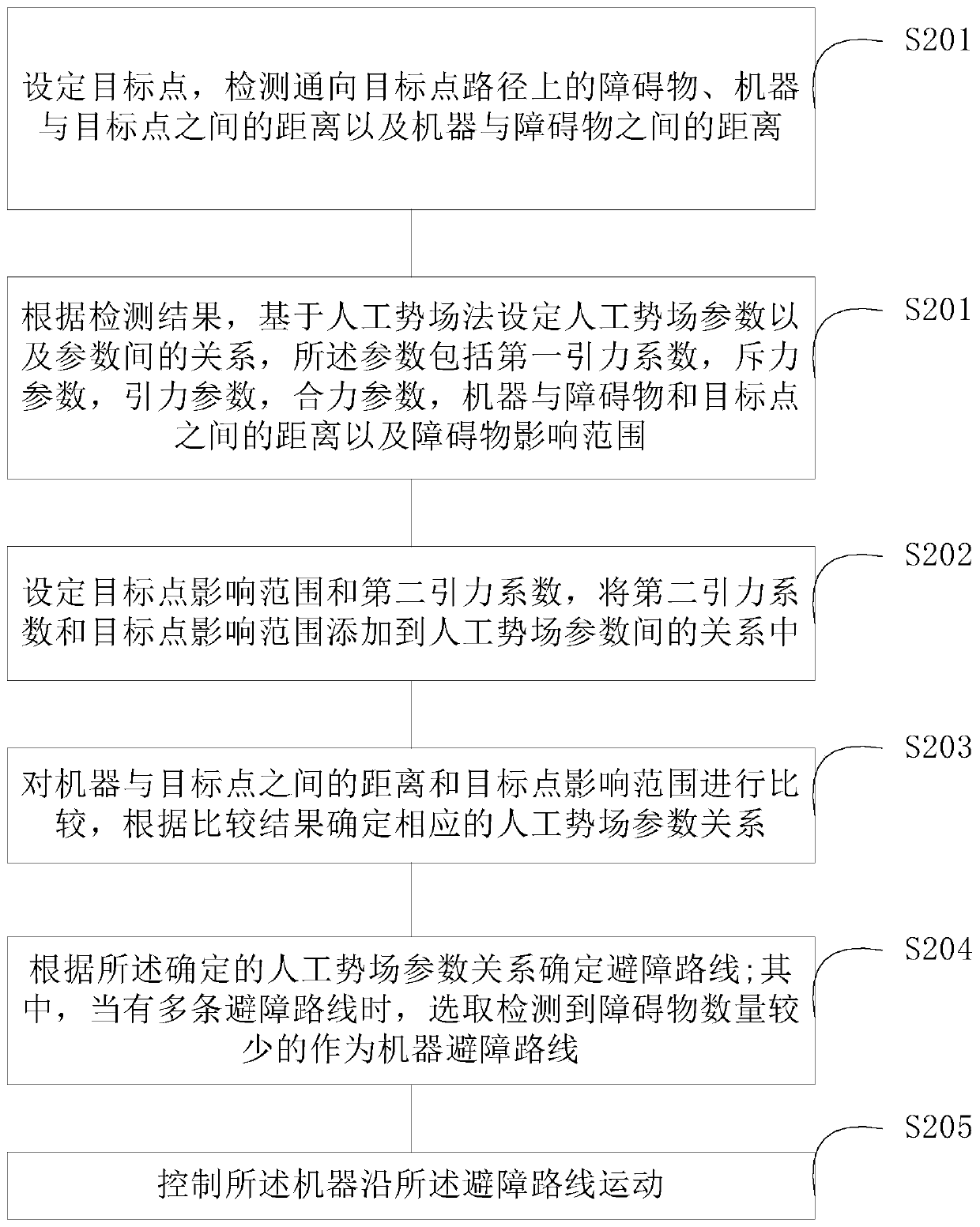
[0073] see figure 2 , which is a flow chart of another machine obstacle avoidance method based on the artificial potential field method provided in Embodiment 2 of the present application.
[0074] Embodiment 2 of the present application includes the following steps:
[0075] S201-S203 are the same as S101-S103 in the first embodiment.
[0076] S204: Determine an obstacle avoidance route according to the determined artificial potential field parameter relationship; wherein, when there are multiple obstacle avoidance routes, select the one with fewer detected obstacles as the machine obstacle avoidance route. ...
Embodiment 3
[0080] Based on the machine obstacle avoidance method based on the artificial potential field method provided in the above embodiments, Embodiment 3 of the present application also provides a test platform for the machine obstacle avoidance method based on the artificial potential field method.
[0081] see Figure 4 , which is a flow chart of building a test platform for a machine obstacle avoidance method based on the artificial potential field method provided in Embodiment 3 of the present application. The specific steps are as follows:
[0082] Step S301: Select a suitable hardware assembly machine, including a machine system, a control system and a power system.
[0083] Wherein, the machine system includes a machine support, etc.; the control system includes a motion control board, a starting base station, a remote controller, and a receiver; and the power system includes a battery, a motor, and the like.
[0084] Step S302: Select an image detection device. In this sys...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More