

Robot local path planning method
A technology for local path planning and robotics, applied in the field of robotic systems, it can solve problems such as the inability to guarantee the optimal path and long response time, and achieve the effects of achieving coordinated operation, improving the success rate, and reducing energy consumption.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0026] The present invention will be further described below in conjunction with specific drawings and embodiments.
[0027] The present invention will be further described below in conjunction with specific drawings and embodiments.
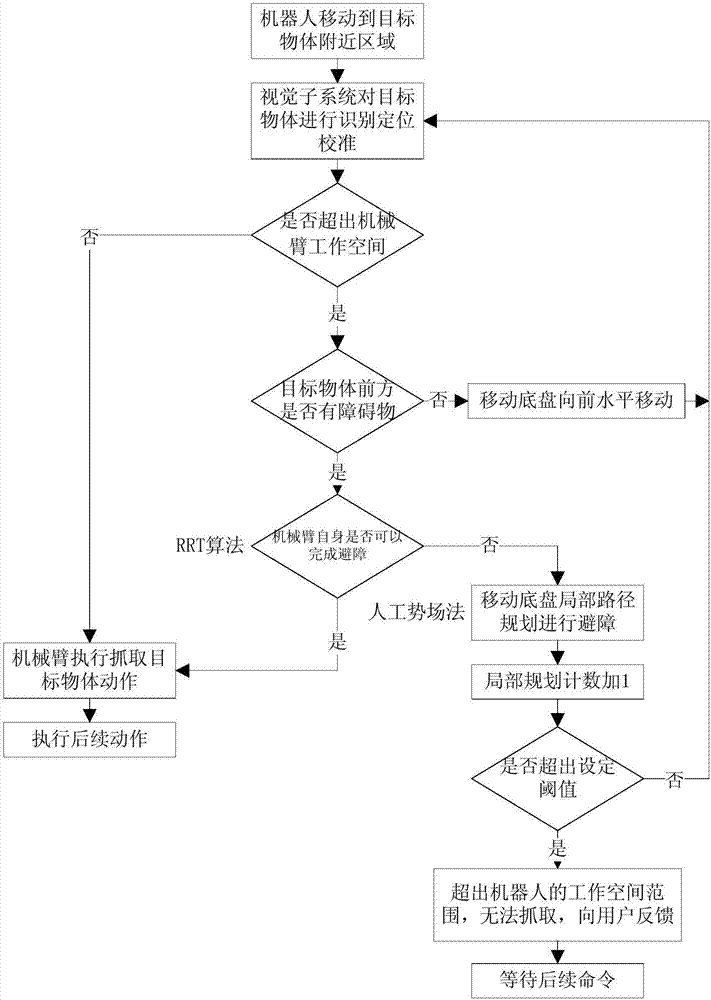
[0028] The robot local path planning method proposed by the present invention mainly includes the following two parts:
[0029] (1) Adopting the visual subsystem for closed-loop detection technology;
[0030] The robotic arm subsystem is separated from the mobile chassis subsystem, and the closed-loop detection and control is performed through the vision subsystem to realize the grasping or placing of the target object by the robotic arm at the optimal base position, while reducing the energy consumption of the robot system.
[0031] Aiming at the problem that the robot is far away from the target object and its positioning accuracy is low, it is proposed to use the vision subsystem for closed-loop detection. After the robot approaches the targ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More