Robot unstacking positioning correction method
A robot and camera technology, applied in the direction of manipulators, program-controlled manipulators, chucks, etc., can solve problems such as wrong grasping, collision, and inaccurate positioning, and achieve the effect of increasing flexibility and fault tolerance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0038] Embodiment: The equipment and models used in this embodiment are shown in Table 1 when the destacking positioning correction method of the present invention is actually used.
[0039] Table 1 equipment and model
[0040]
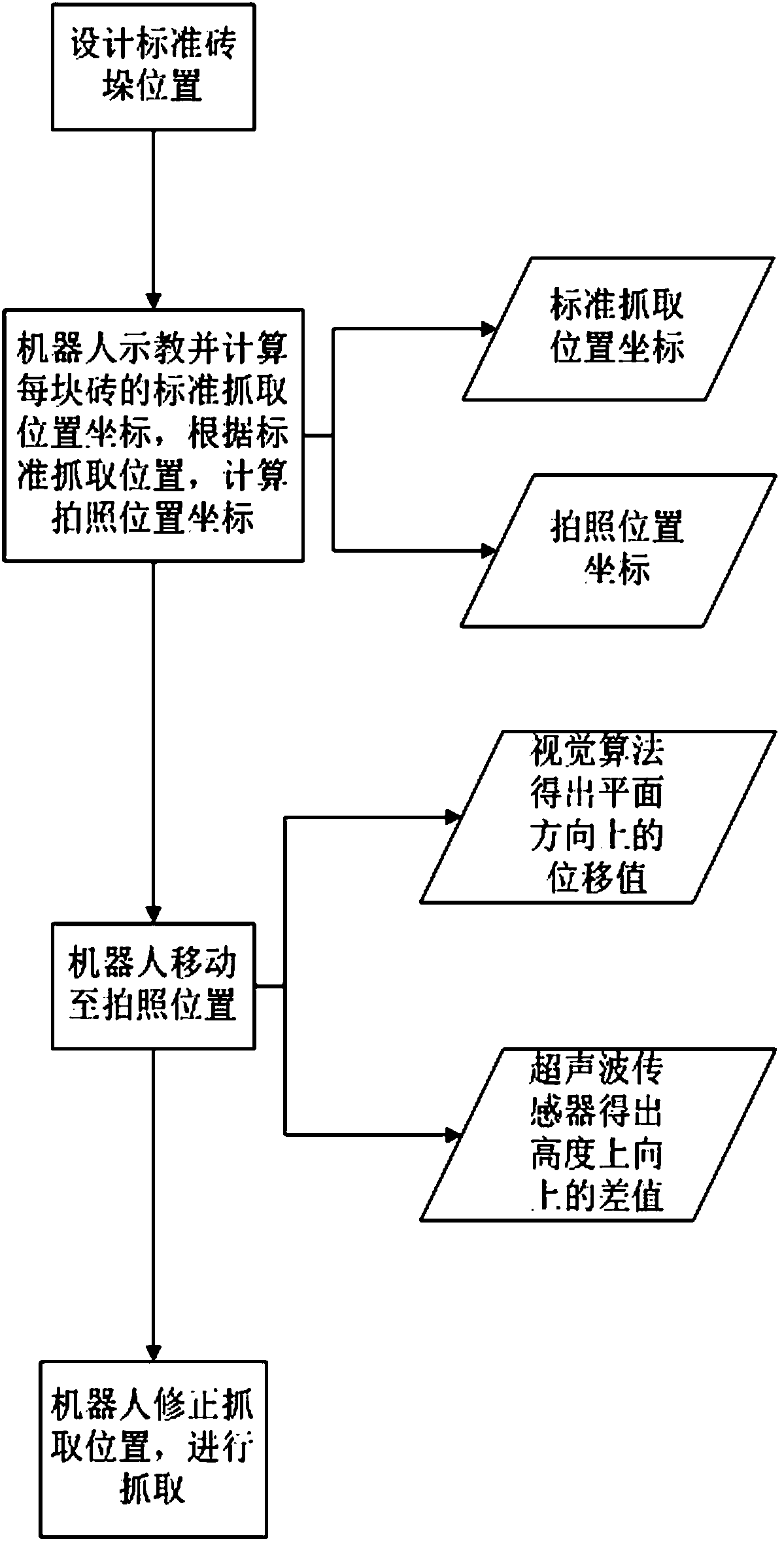
[0041] In this embodiment, the method for correcting robot destacking and positioning, the process is as follows: figure 1 As shown, it mainly includes the following steps:
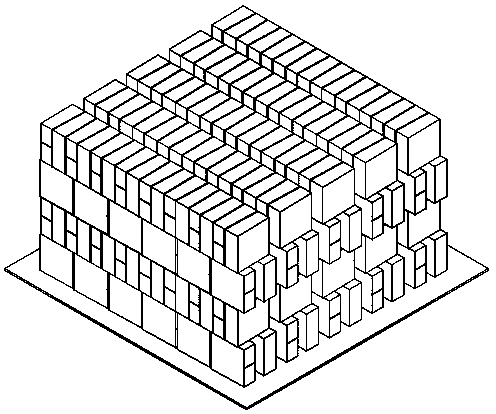
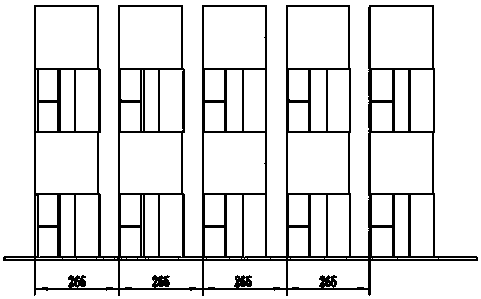
[0042] Step 1. Design a standard brick stack, and record the layer number and position number of each brick in the standard brick stack; the standard brick stack must satisfy the requirement that the bricks be placed at equal intervals and at equal heights, regardless of the bricks being fired. Displacement generated during restraint and movement.
[0043] The design of standard brick stacks can be found in figure 2 , the standard brick stack has two brick types: brick type 1 and brick type 2. The brick types are B320 and B620 respectively. For specific brick types, see ...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap