

State estimation method based on novel adaptive high-order unscented Kalman filter
An unscented Kalman and state estimation technology, applied in radio wave measurement systems, instruments, etc., to solve problems such as the need to improve accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach 1
[0078] The specific implementation method can be divided into the following steps:
[0079] Step 1: Establish target tracking nonlinear discrete state model and measurement model;
[0080] Step 2: Select the optimal free parameter κ according to the state dimension of the target tracking system;
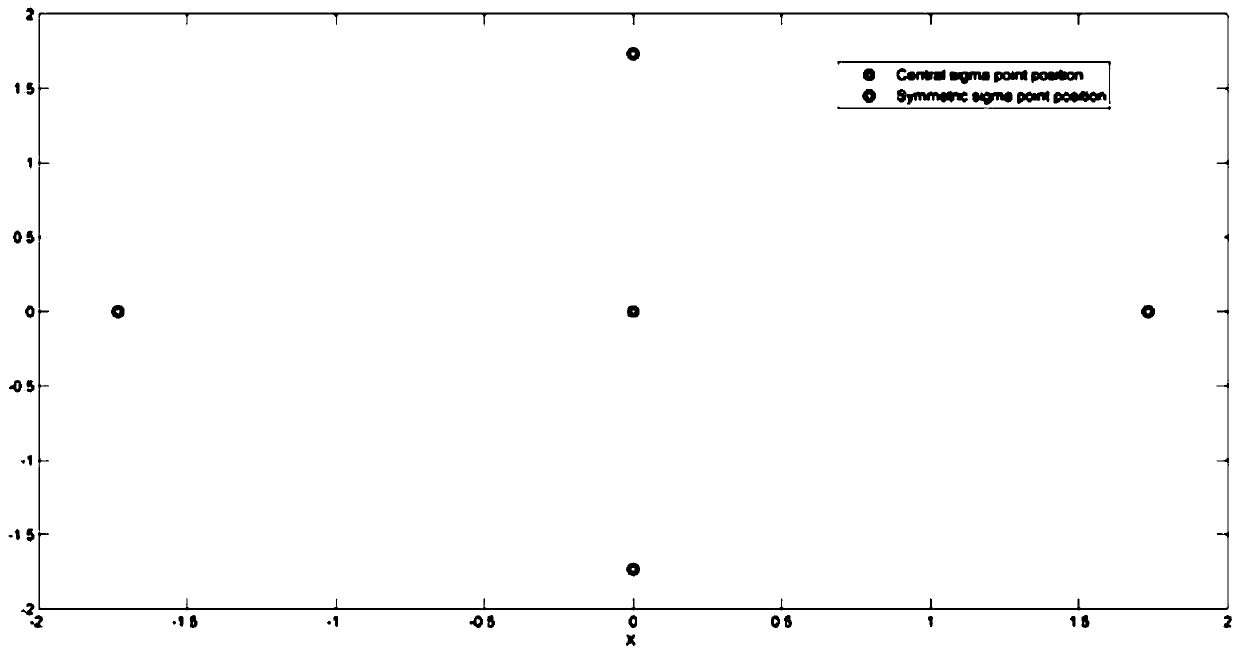
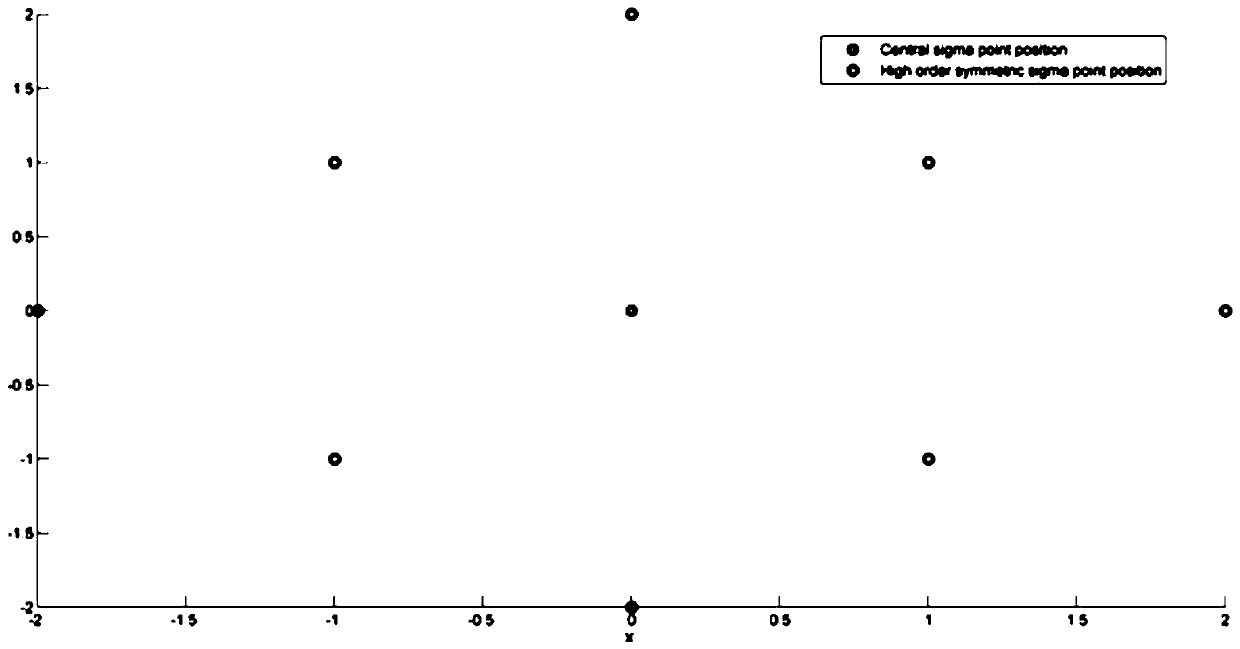
[0081] Step 3: Establish the adoption point and weight of high-order UT acquisition status;
[0082] Step 4: Pass the sampling points through a nonlinear function, and perform weighting processing to obtain the state one-step prediction and the state one-step prediction covariance matrix;
[0083] Step 5: Bring the optimal adaptive factor into the state and predict the covariance matrix in one step;
[0084] Step 6: Establish high-level UT acquisition and measurement adoption points and weights;
[0085] Step 7: Transfer the sampling points through a nonlinear function, and perform weighting processing to obtain the measurement one-step prediction and measurement one-step predicti...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More