

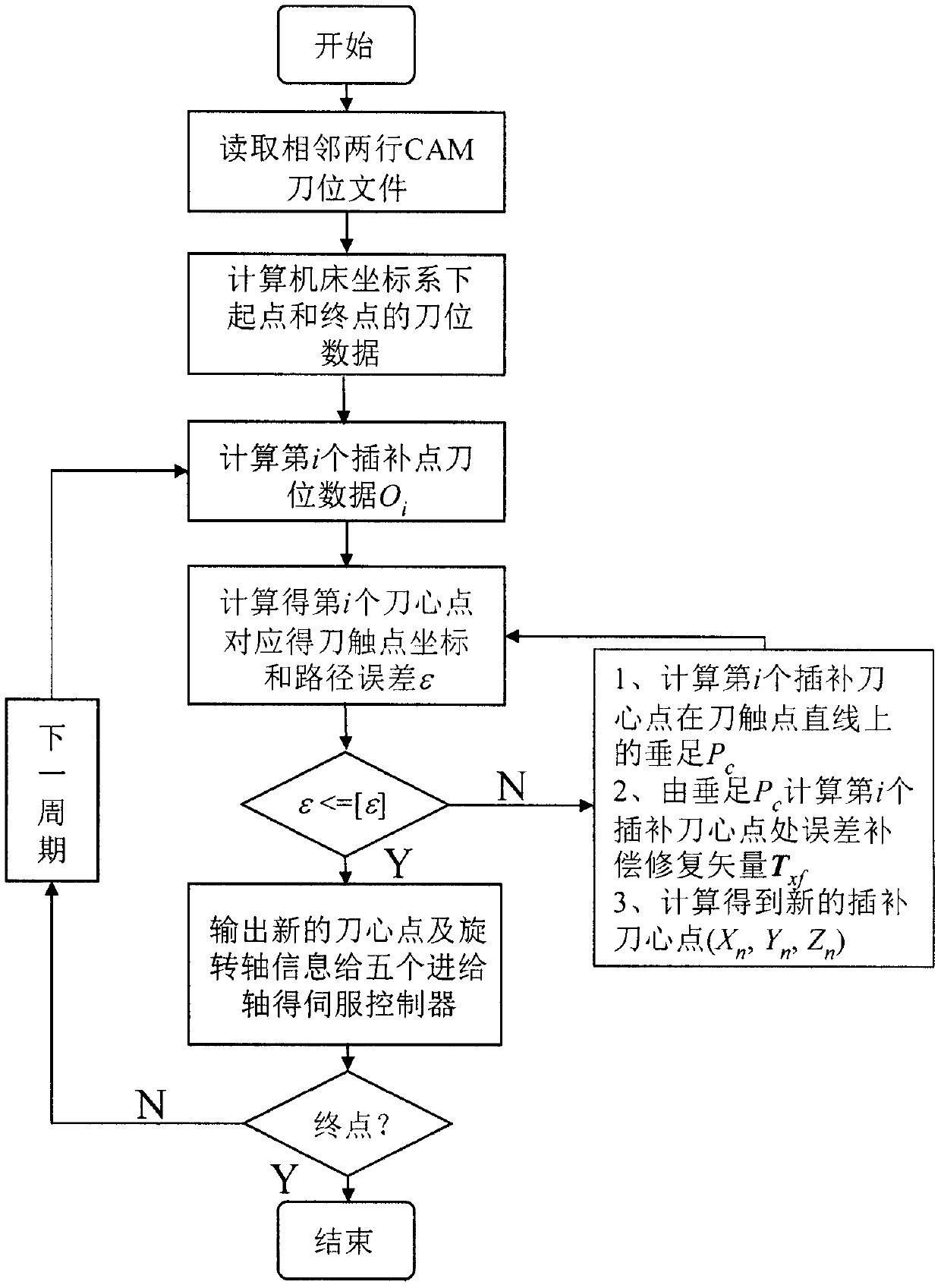
Non-linear error control method based on eight-parameter five-axis linear interpolation
A nonlinear error and linear interpolation technology, applied in the direction of program control, computer control, general control system, etc., can solve the problems such as the inability to effectively control the nonlinear error of the linear trajectory of the tool contact and the increase in the amount of machining programs, and achieve nonlinear Error control, the effect of ensuring position accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
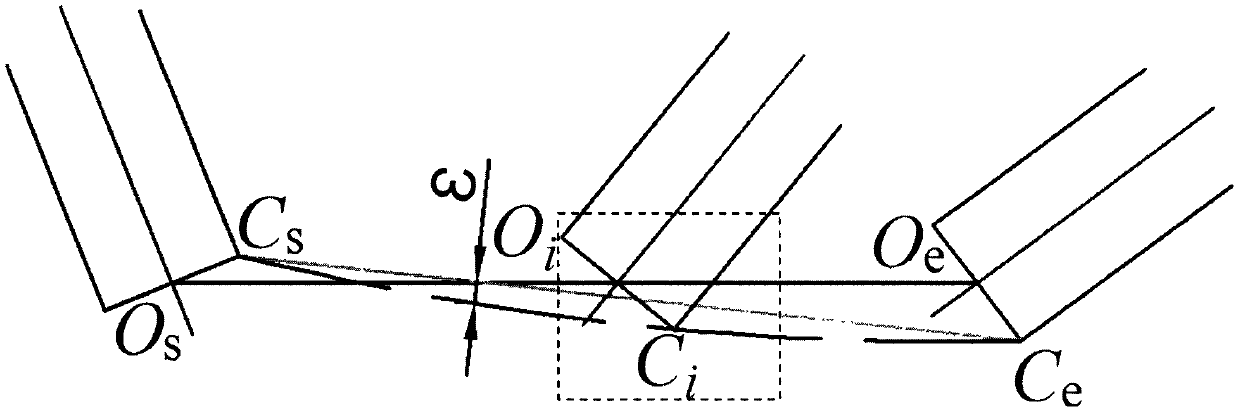
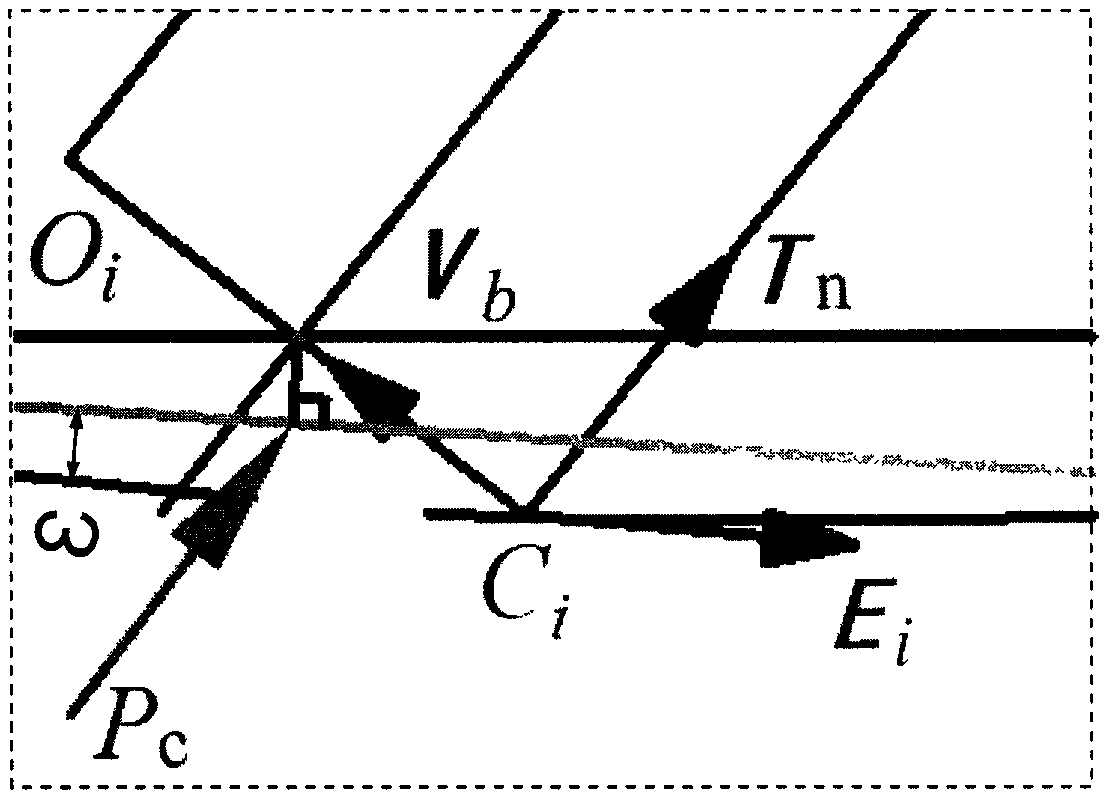
[0016] In the present invention, an A-C double turntable five-axis CNC machine tool will be used as an example to illustrate how to implement it. The implementation principles of other types of five-axis CNC machine tools are similar. The tool of the A-C double turntable five-axis CNC machine tool moves in parallel along the translation axis, and at the same time the workpiece is fixed on the worktable to realize two rotational movements of A and C around the X axis and around the Z axis, in the coordinates of translation and rotation. After synthesis, the spatial pose of the tool relative to the workpiece is finally formed. For the convenience of explanation, firstly, the mechanism of non-linear error generation of the linear trajectory of the tool contact during five-axis linear interpolation is elaborated in detail.
[0017] In the machine tool coordinate system, the mechanism of non-linear error at the tool contact point is as follows: figure 2 shown. Generally speaking...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More