

Safety cooperation method and device based on man-machine integration
A safe, human-machine technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of human-robot collaborative operation efficiency, flexibility limitations, and no comprehensive modeling of robots and humans, so as to avoid the risk of human-robot collision. , the effect of improving flexibility and safety performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
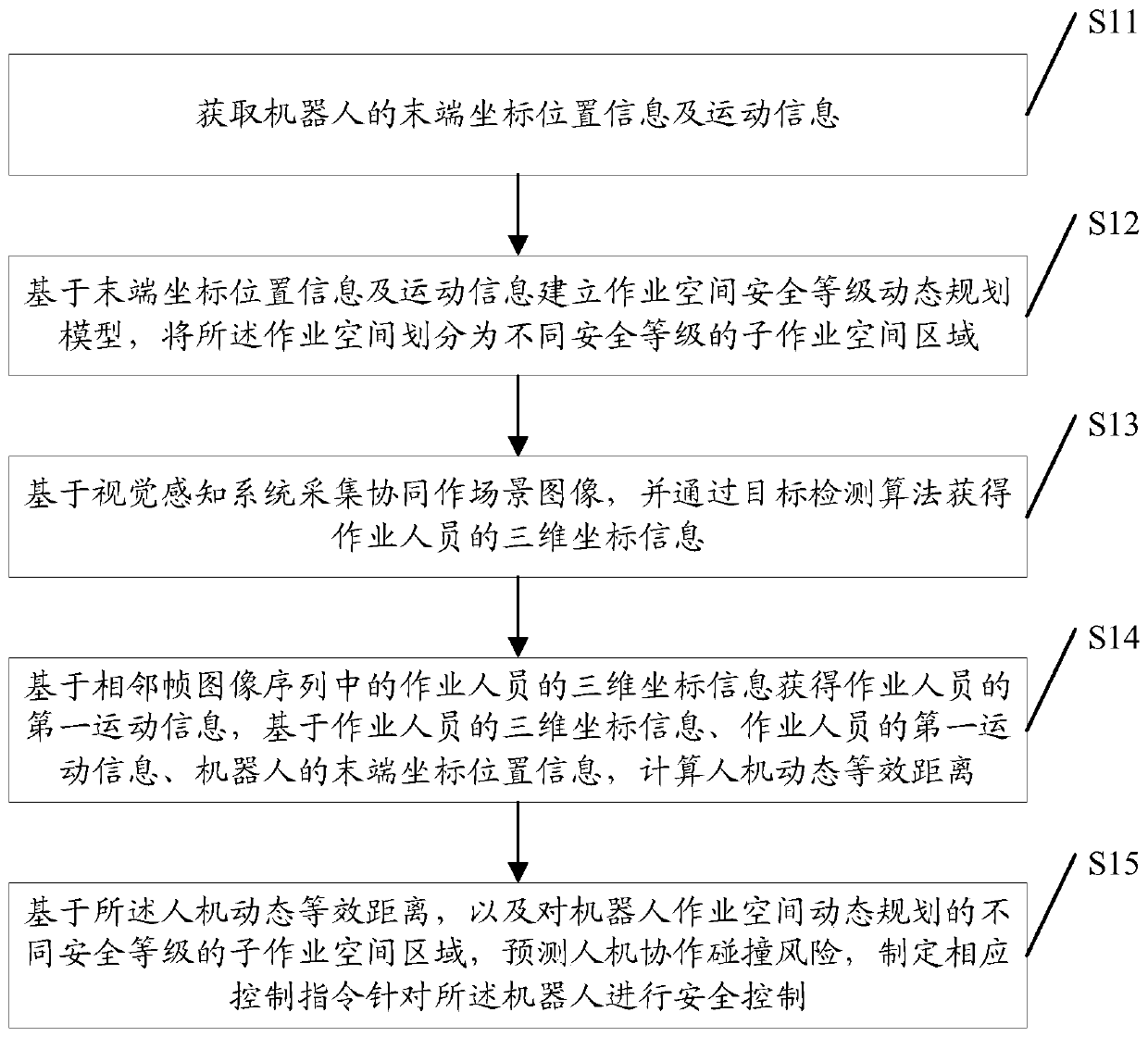
[0053] see figure 1 , figure 1 It is a schematic flow chart of a safe collaboration method based on human-computer integration in an embodiment of the present invention.
[0054] Such as figure 1 As shown, a safe collaboration method based on human-computer integration, the safe collaboration method includes:
[0055] S11: Obtain the end coordinate position information and motion information of the robot, wherein the motion information includes motion speed information and motion direction information;
[0056] In the specific implementation process of the present invention, the coordinate position information and motion information of the end of the robot are obtained by connecting the robot controller, wherein the motion information includes motion speed information and motion direction information; wherein the end coordinate position information of the robot is P robot (x,y,z), the motion speed information is
[0057] S12: Establish a dynamic planning model of safety ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More