

Vision-based multi-fin cooperation drive robotic fish
A robotic fish and vision technology, used in motor vehicles, underwater operation equipment, steering with rudders, etc., can solve the problem of poor head stability, unclear camera images, and inability to cooperate with fins to realize flexible turning of robotic fish. and other issues to achieve the effect of improving flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
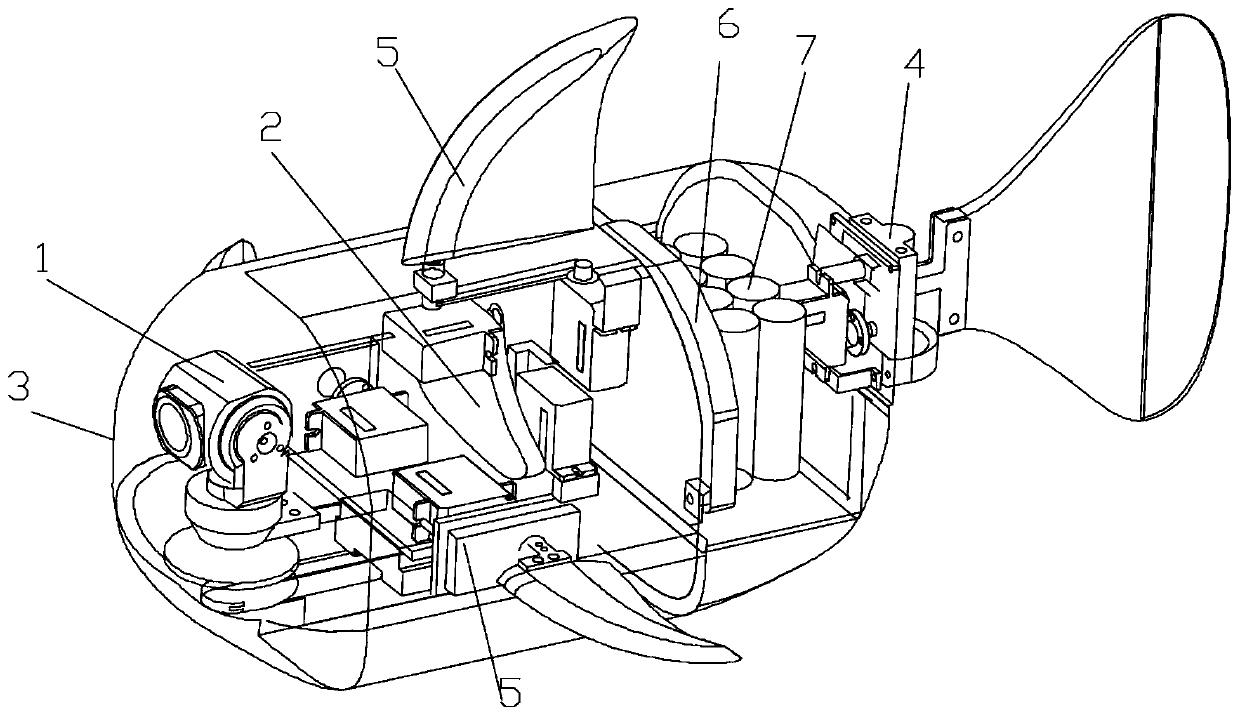
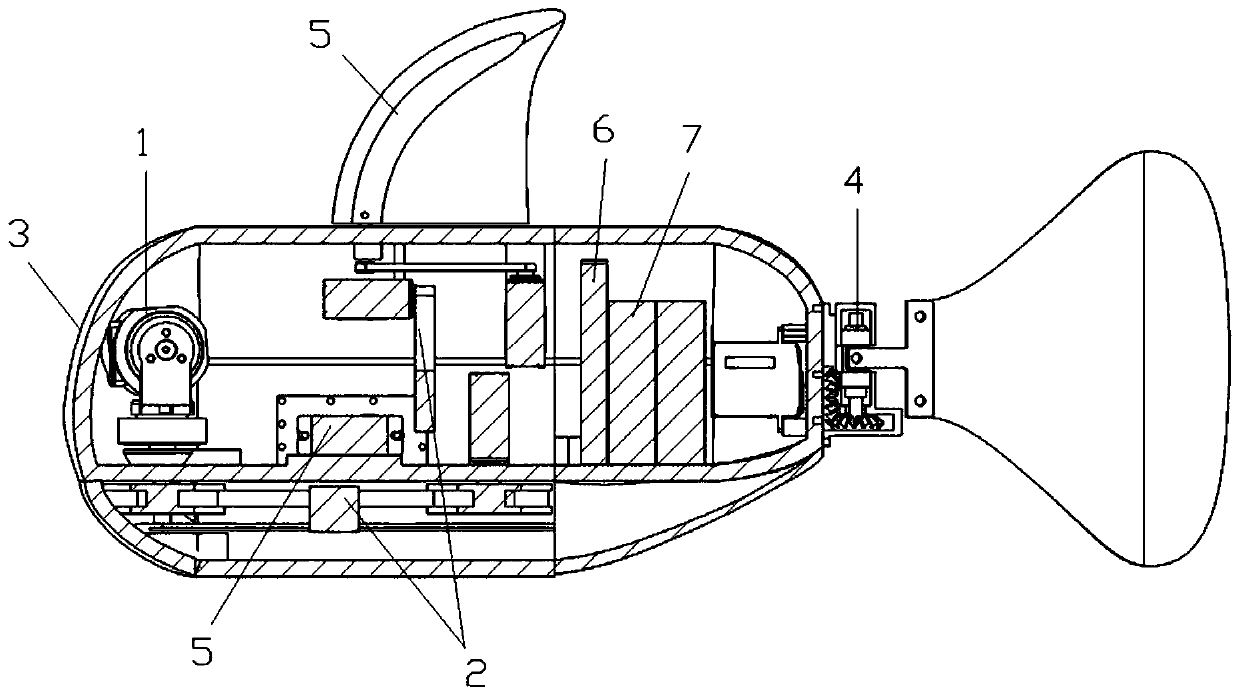
[0042] see Figure 1-2 As shown, a vision-based multi-fin cooperative driving robotic fish provided by the embodiment of the present invention includes a housing 3, a fish tail power module 4, a fin auxiliary module 5, a camera module 1, a center of gravity adjustment module 2 and a A control module 6 and a power module 7 for the operation of the robotic fish.
[0043] Such as Figure 6 As shown, the control module 6 includes a control circuit board, and the power module 7 includes several batteries; The fin auxiliary module 5 is electrically connected. There is enough space at the tail of the fish to store the control circuit board and battery to control the operation of the entire robotic fish system.
[0044] The movement mode of the robot fish is: powered by the power module (tail fin), through the mutual cooperation between the auxiliary fin module (pectoral fin and dorsal fin) and the center of gravity adjustment module, the fish can rise and dive and swim straight in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More