

A one-way plane torsion spring
A plane torsion spring and torsion spring technology, applied in the field of robotics, can solve the problems of reducing the reliability of the limit function, the failure of the limit cable, and the complex structure, achieving a large relative rotation range, protecting the torsion spring structure, and torque bearing. high volume effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
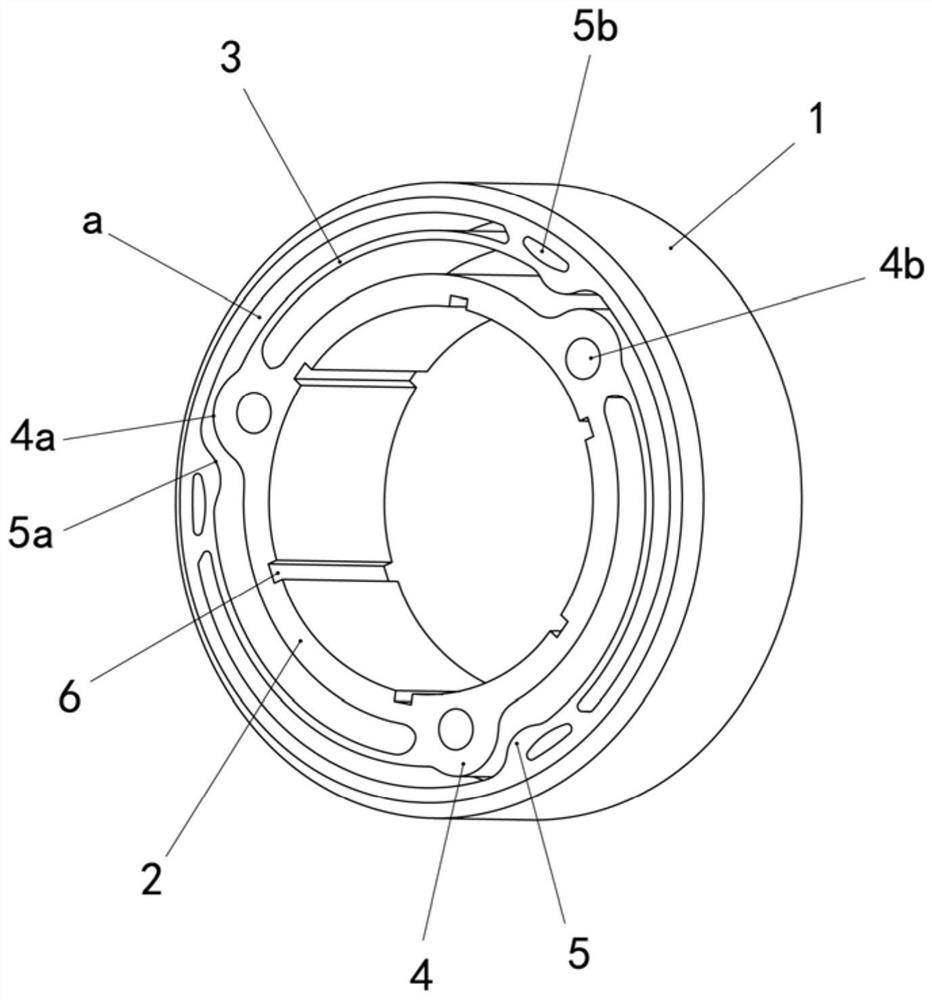
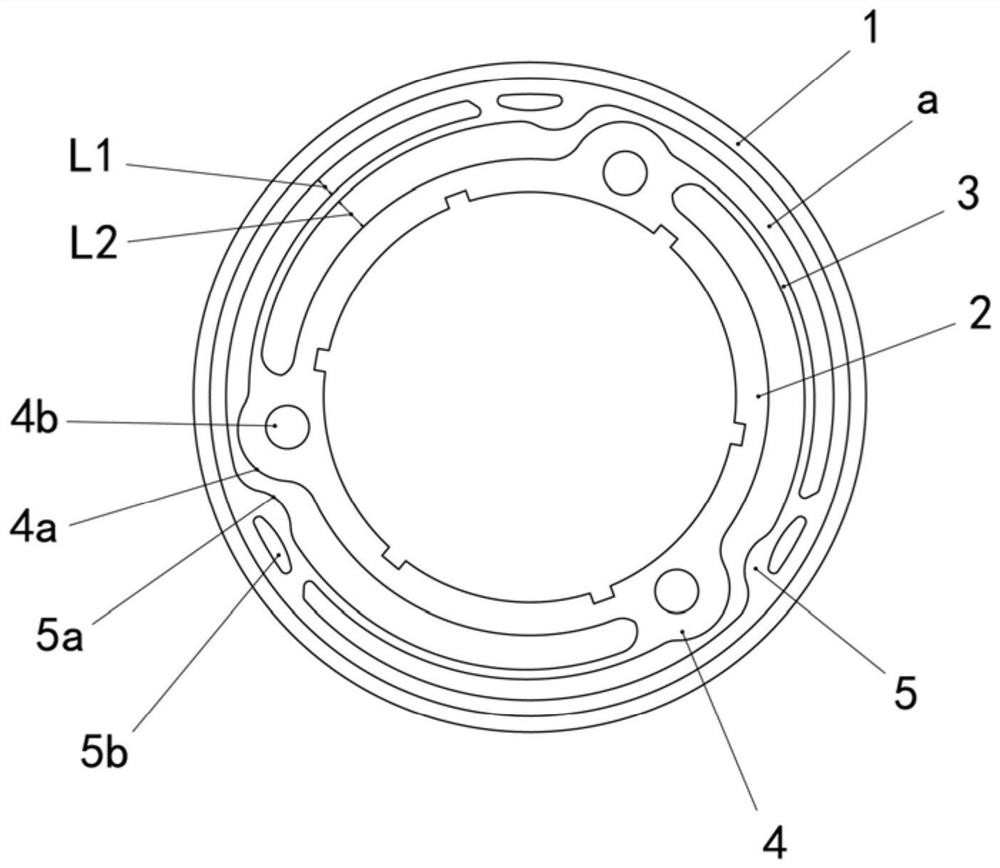
[0037] Such as figure 1 As shown in -5, a one-way planar torsion spring includes a torsion spring outer ring 1, a torsion spring inner ring 2, and a plurality of torsion spring elastic bodies 3, and there is a gap between the torsion spring outer ring 1 and the torsion spring inner ring 2 Space a, a plurality of torsion spring elastic bodies 3 are distributed in the gap space a between the torsion spring outer ring 1 and the torsion spring inner ring 2 .
[0038] One end of the torsion spring elastic body 3 is drawn from the inner peripheral surface of the torsion spring outer ring 1, along the outer peripheral direction of the torsion spring inner ring 2, taking the surrounding curve as the extension reference, and the other end of the torsion spring elastic body 3 extends to the torsion spring inner ring 2, the relative rotation between the torsion spring inner ring 2 and the torsion spring outer ring 1 along the extension direction of the torsion spring elastic body 3 will ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More