

Attitude error compensation method of laser gyroscope dual-axis rotary inertial navigation system
A dual-axis rotation, inertial navigation system technology, used in navigation calculation tools, navigation through velocity/acceleration measurement, measurement devices, etc. question
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0073] The present invention will be further described below in conjunction with accompanying drawing and specific embodiment, but following embodiment does not limit the present invention in any way.
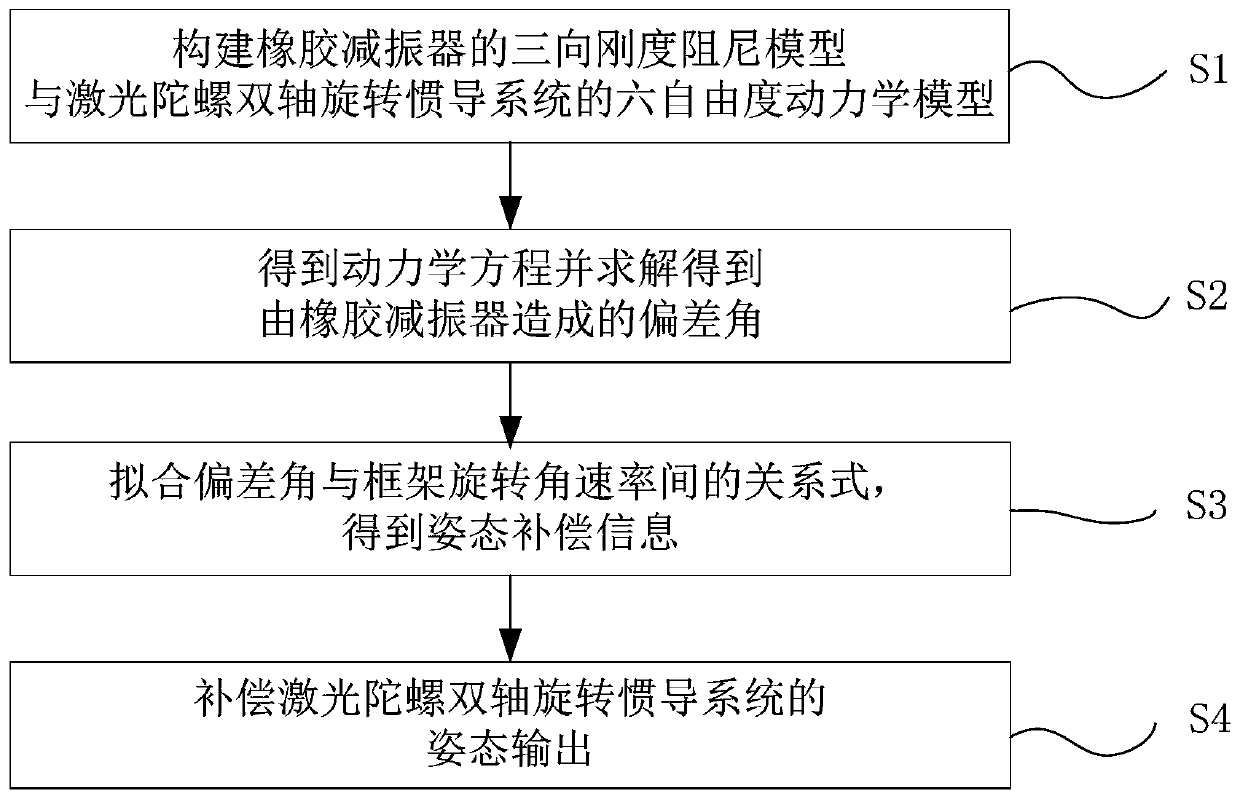
[0074] Such as figure 1 As shown, by taking the 8 rubber shock absorbers between the laser gyro inertial measurement device and the inner frame of the dual-axis rotating mechanism in a laser gyro dual-axis rotary inertial navigation system as an example, the attitude error compensation method of the present application To describe the specific process, the specific steps are as follows:
[0075] S1. Construct a three-dimensional stiffness-damping model for each rubber shock absorber, replace eight rubber shock absorbers with eight three-dimensional stiffness-damping models, and build a six-degree-of-freedom dynamics model of the laser gyro dual-axis rotary inertial navigation system;
[0076] Specifically, the construction steps of the six-degree-of-freedom dynamic model in st...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More