

Neighbor weight-based parameter selection and transmission point cloud attribute encoding and decoding method and equipment
An encoding method and attribute technology, which is applied in the field of point cloud processing, can solve the problems of low attribute prediction accuracy and lower encoding and decoding performance, and achieve the effect of improving attribute compression performance and improving utilization
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0041] Embodiment 1 of the method for encoding and decoding point cloud attributes based on neighbor weight parameter selection and transfer, including the following steps A and B:
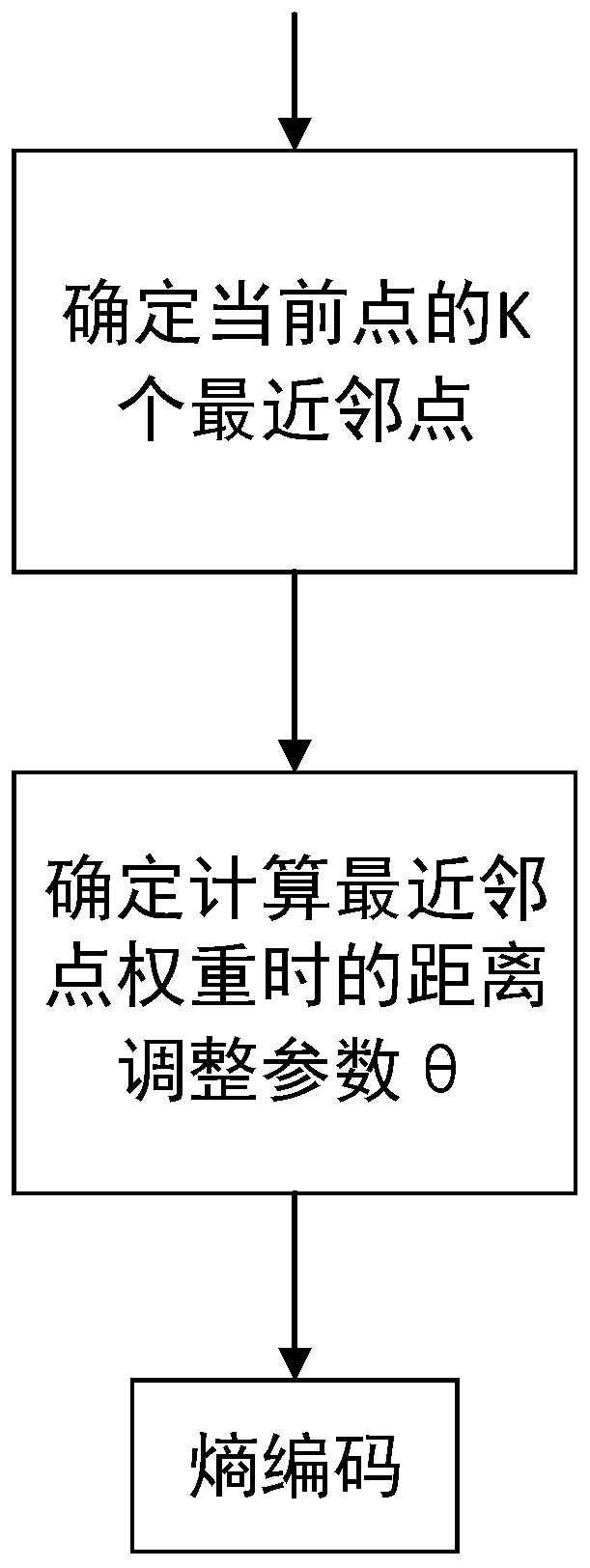
[0042] A. Perform steps (1) to (3) on the encoding side, such as figure 1 Shown is a schematic flow chart of the attribute compression coding end of Embodiment 1, including:
[0043] (1) Determine the K nearest neighbors of the current point according to the spatial distance from the point in the point cloud to the current point.
[0044] (2) Determine the distance adjustment parameter θ when calculating the weight of the nearest neighbor point: that is, the parameter θ of the distance in the Z direction when calculating the neighbor weight. Selection method 1: According to different types of attributes, use a specific value of θ for a specific type of attribute. Specifically, for example, use θ value of 1 for the color attribute and 3 for the reflectance attribute; Method 2: Change the parameter...
Embodiment 2
[0052] Embodiment 2 of the method for point cloud encoding and decoding based on neighbor weight parameter selection and transfer includes the following steps C and D:
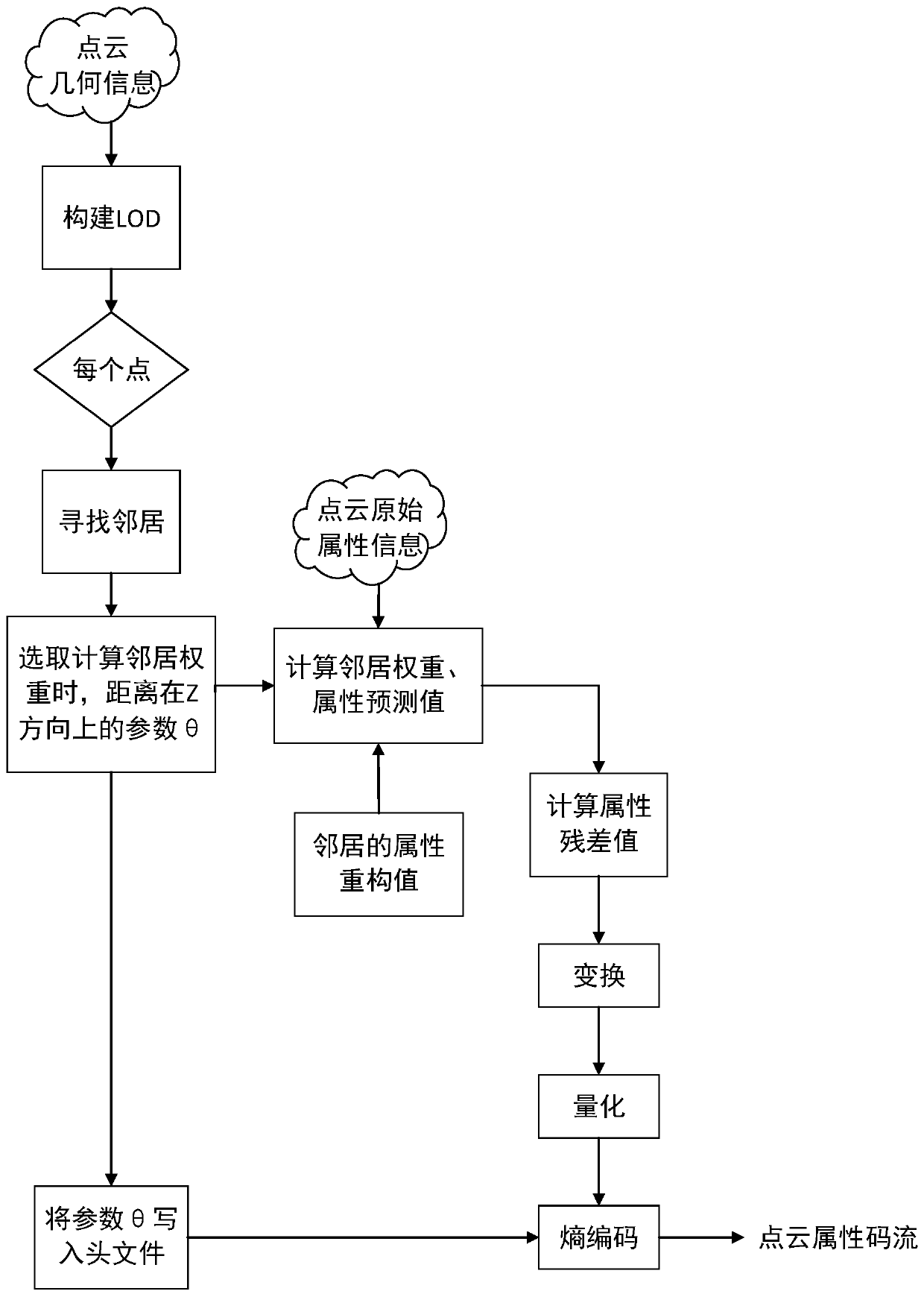
[0053] C. Perform steps (1) to (5) on the encoding side, such as image 3 Shown is a schematic flow chart of the attribute compression coding end of embodiment 2, including:
[0054] (1) Construct LOD and find neighbors for each point in it Traverse the points in the PointCloud, add them to the LOD respectively, and determine the K nearest neighbors of the current point according to the geometric information of the point cloud. The specific construction process is: sort all the points in the point cloud according to the Morton code sequence, that is, according to the preset LOD layer number, down-sample the sorted points, and the obtained points after each sampling constitute a Layer LOD, the sampling distance is from large to small, until the entire LOD is constructed, and the point cloud after LOD sorting i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More