

Electric motor train set neutral-section passing control method
A technology of over-phase separation and EMUs, which is applied in the direction of power lines, vehicle components, railway signals and safety, etc., to achieve the effect of ensuring safety and reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
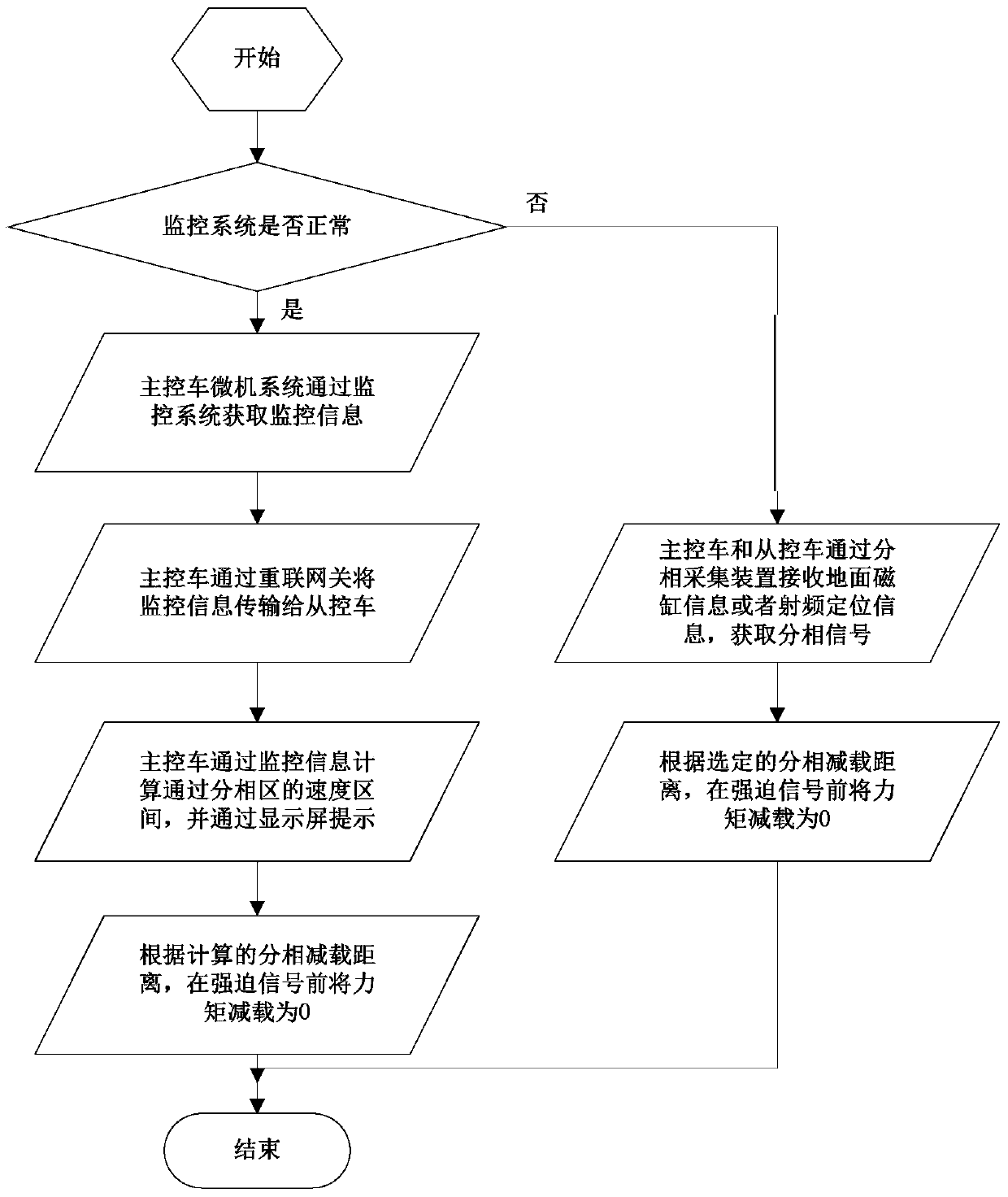
[0073] Example 1 Obtain phase-splitting area information through monitoring
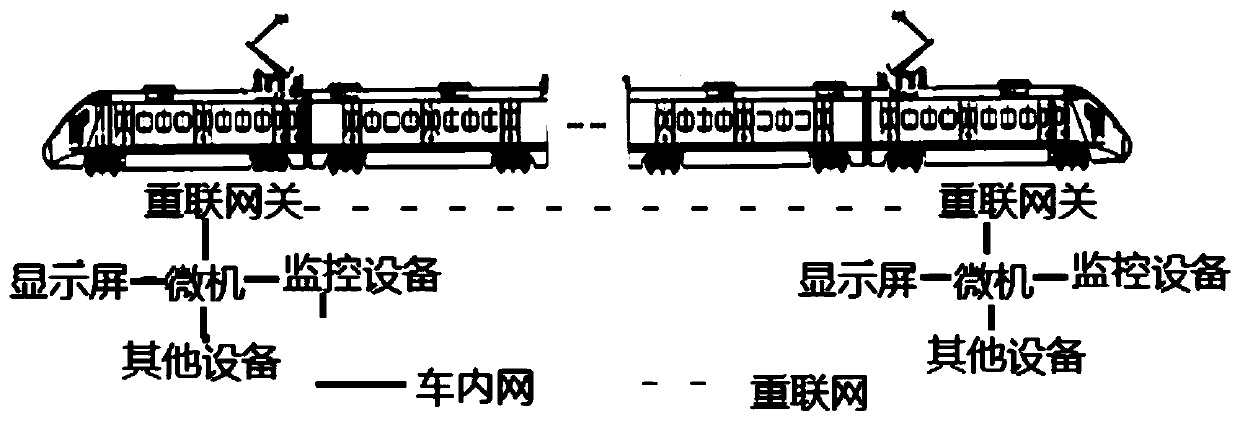
[0074] Such as figure 2 As shown, when the EMU passes through the phase separation area, it is necessary to obtain the relevant information of the phase separation area in advance, so that the EMU can shed load and disconnect the main circuit breaker in advance. When the monitoring system of the main control car is normal, the microcomputer system of the main control car receives monitoring information from the monitoring system in real time. The received monitoring information includes total weight, number of vehicles, captain, speed, slope, speed limit value, current kilometer mark and Kilometer mark of phase separation area.
[0075] When the monitoring system of the master control vehicle fails, the master control vehicle and the slave control vehicle can receive ground magnetic cylinder information or radio frequency positioning information through their respective phase separation acquisition...
Embodiment 2
[0079] Example 2 Optimal Control of Excessive Phase Speed Load Shedding
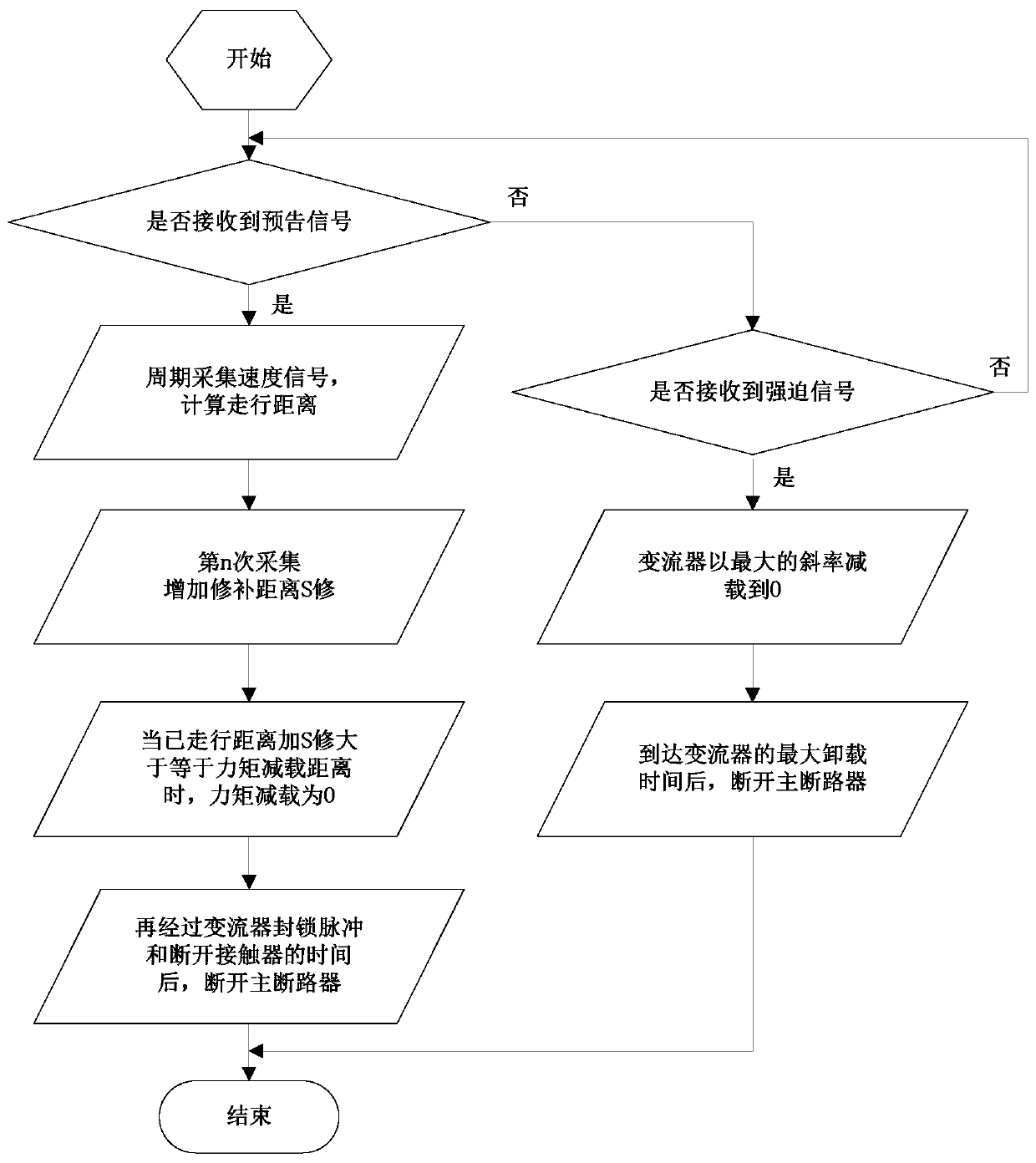
[0080] Such as image 3 As shown, after the EMU receives the warning signal, it starts to reduce the load, and the traction load is reduced to zero within the time T1, and then the main circuit breaker is disconnected after the time T2. T1 time is the time when the traction load is reduced to 0; T2 time is the time when the converter blocks the pulse and disconnects the contactor.
[0081] Among them, TI time is the time required to complete the torque load reduction to zero within the torque load reduction distance, which is a dynamic adjustment value. This is because, if the T1 time is specified as a fixed value, it will appear: when the specified T1 time is too short , there will be a certain probability that the main main circuit breaker will be separated too early, and the speed loss of the EMU will be too large; If the T1 time takes an intermediate value, it will still cause speed loss.
[008...
Embodiment 3
[0085] Embodiment 3 bow down mode selection
[0086] Such as Figure 4 As shown, the marshalling form of the EMU is divided into two types: fixed marshalling and flexible marshalling. When the fixed marshalling is used, the distance between the two power cars has been calculated, and there will be no phase-to-phase short-circuit failure when the motor car passes through the phase-separation zone; During marshalling, a phase-to-phase short-circuit fault may occur when the EMU passes through the phase-separation zone.
[0087] In order to solve this problem, the microcomputer system of the main control vehicle judges whether the current formation mode will have a phase-to-phase short circuit fault according to the formation information provided by the monitoring system and the reconnection gateway, and prompts the driver to manually select the bow down mode through the display screen. ; When the monitoring system or the reconnection gateway fails, the current marshalling mode c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More