

Improved FastSLAM algorithm based on clustering and membrane calculation
A membrane computing and clustering technology, applied in computing, navigation computing tools, computer components, etc., can solve problems such as poor results, and achieve the effects of increasing diversity, expanding search range, and low efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
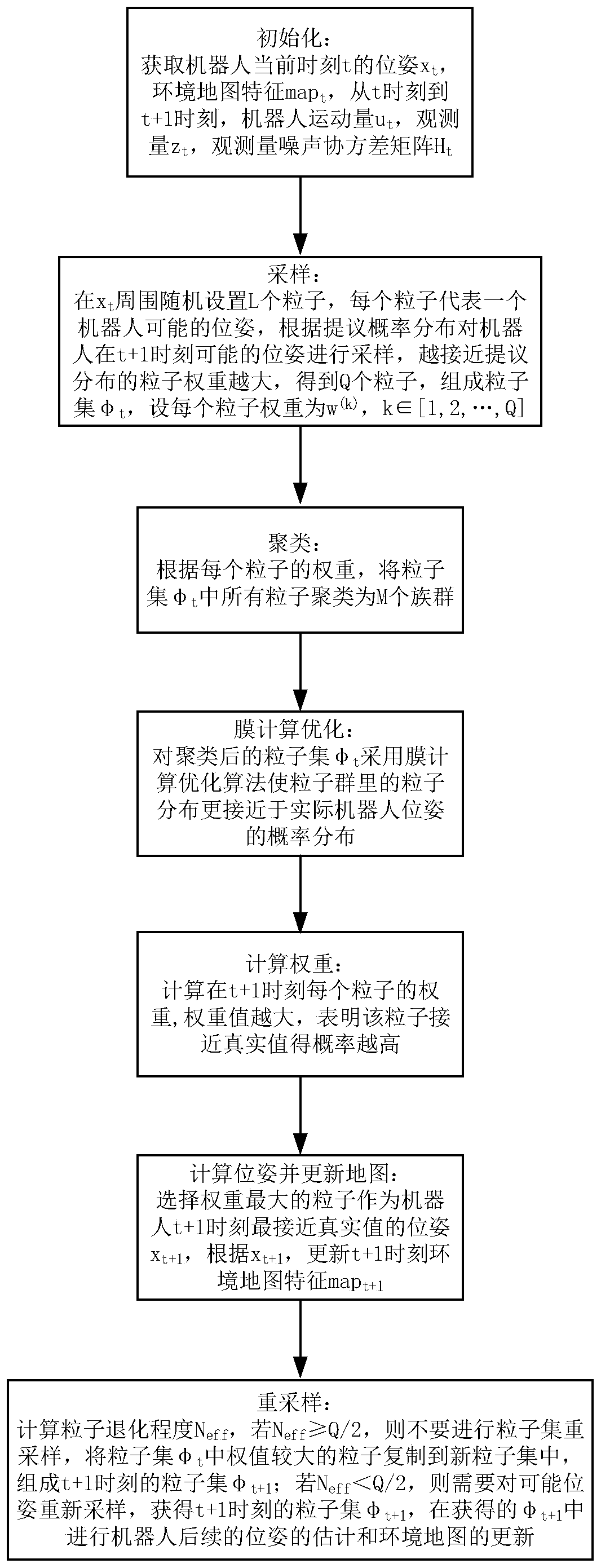
[0033] Such as figure 1 As shown, the process of an improved FastSLAM algorithm based on clustering and membrane calculation is:
[0034] (1) Initialize, obtain the pose x of the robot at the current moment t t , the environment map feature map t , from time t to time t+1, the movement amount u of the robot t , the observed quantity z t , observation noise covariance matrix H t ;
[0035] (2) Sampling, at x t Randomly set L particles around, each particle represents a possible pose of the robot, and then according to the proposed probability distribution Where (k) represents the kth pose, and samples the possible poses of the robot at time t+1. The closer to the proposed distribution, the greater the weight of the particles, and Q particles are obtained to form the particle set φ t , let the weight of each particle be w (k) , k∈[1,2,…,Q]:
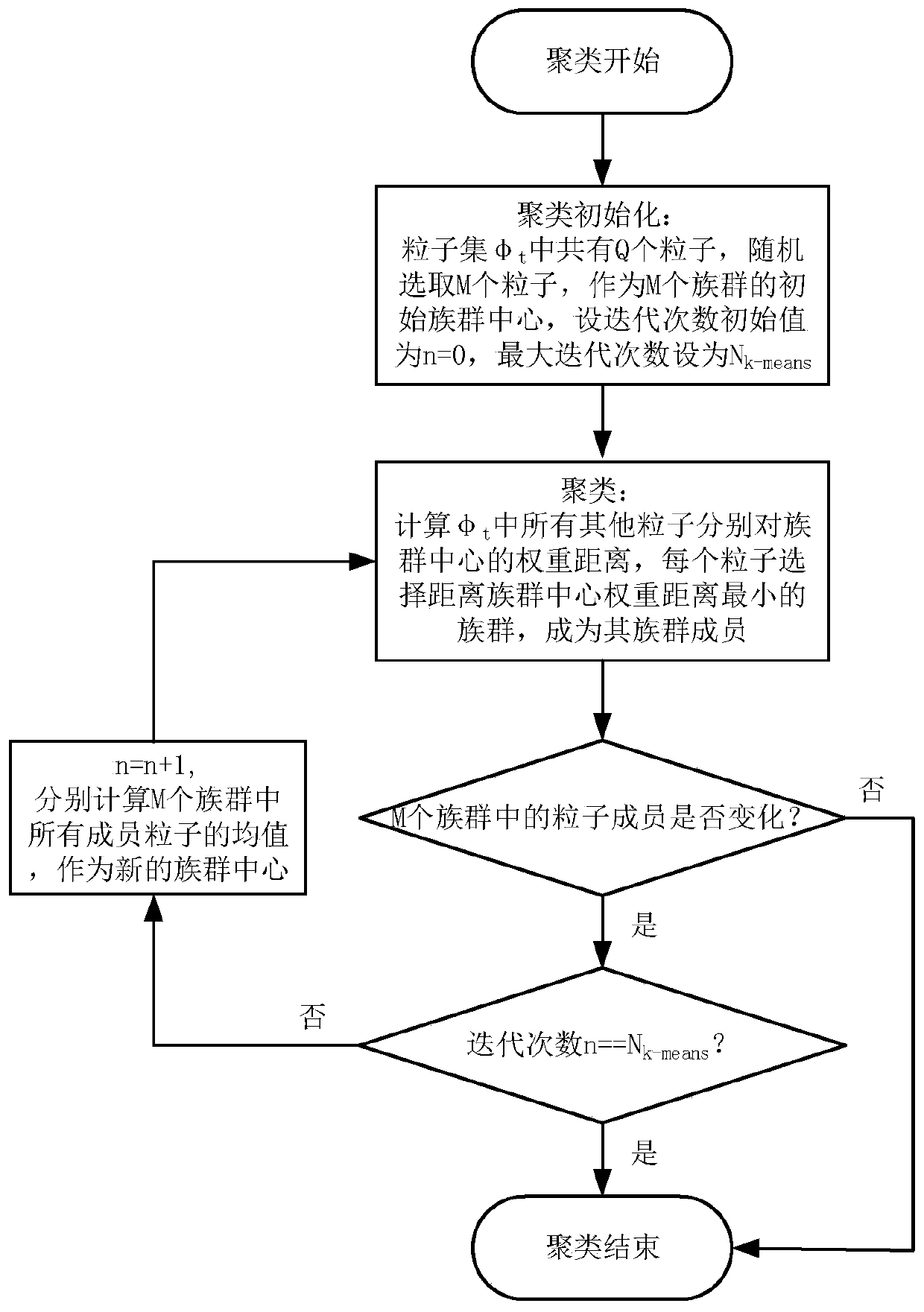
[0036] (3) Clustering, according to the weight of each particle, the particle set φ t All particles in are clustered into M gro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More