

A Cooperative Optimal Control Method for Mixed Traffic Flow Based on Bi-Level Programming
A technology of mixed traffic and collaborative optimization, applied in the field of traffic engineering
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
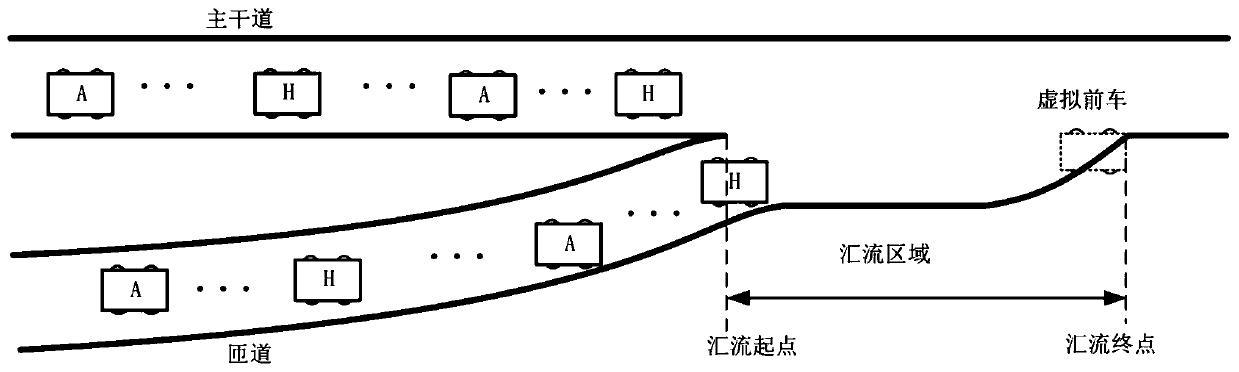
[0098] In this embodiment, the method of the invention is described by taking the merging of vehicles on a freeway ramp as an example.
[0099] Such as figure 2 As shown, it is a schematic diagram of vehicle convergence on a highway ramp in a mixed traffic flow scenario, in which the main road (that is, the Y road) and the ramp (that is, the X road) are both one-way and one-way roads, and there are several autonomous vehicles A on the main road ( Vehicles that can be optimally controlled) and human-driven vehicles H (that is, vehicles that cannot be optimally controlled) are irregularly arranged traffic flows, and there are several autonomous vehicles A and human-driven vehicles H that are irregularly arranged on the ramp. between traffic on the main road. It is assumed that the autonomous driving vehicle A and the human driving vehicle H on the main road and ramp follow the microscopic car-following model.
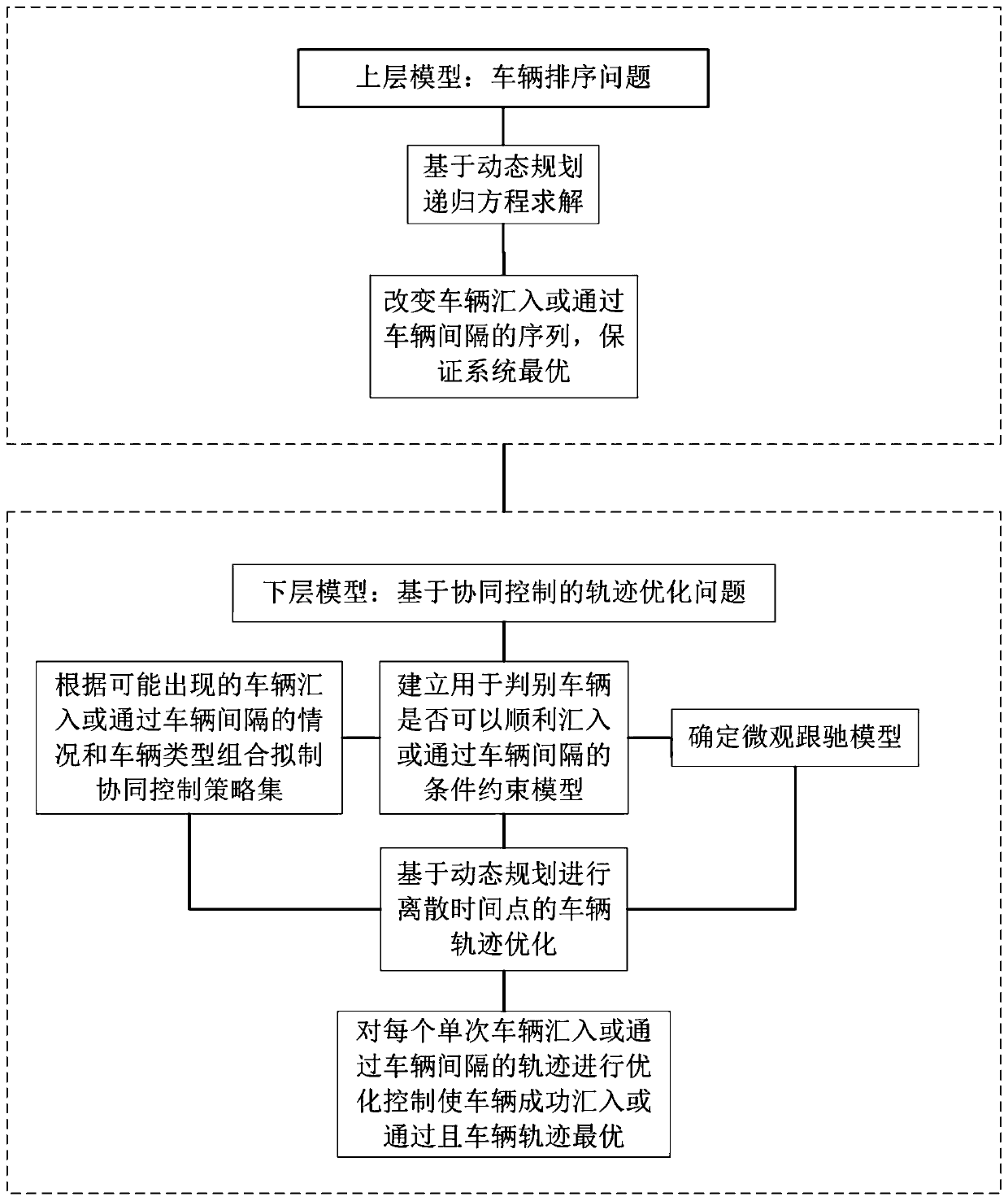
[0100] Upper-level model description: The merging of vehicles on ...
Embodiment 2
[0197] In this embodiment, the method of the invention is described by taking vehicles merging at an intersection as an example.
[0198] Vehicle merging at an intersection: Road X and Road Y are two one-way one-way roads with intersections, and there are several autonomous vehicles (that is, vehicles that can be optimally controlled) and human-driven vehicles (that is, vehicles that cannot be optimally controlled) on the Y road. Irregularly arranged traffic flow, there are several self-driving vehicles and human-driven vehicles on the X road to form an irregularly arranged traffic flow, which needs to turn at the intersection and merge into the interval between the traffic flows on the Y road. Assume that both autonomous vehicles and human-driven vehicles on road X and road Y follow a microscopic car-following model.
[0199] Upper-level model description: The merging of vehicles at an intersection is the process of vehicles waiting to merge turn and merge into the through tr...
Embodiment 3
[0252] In this embodiment, the method of the invention is described by taking a vehicle passing through an intersection as an example.
[0253] Vehicles passing through the intersection: Road X and Road Y are two one-way one-way roads with intersections, and there are several autonomous vehicles (that is, vehicles that can be optimally controlled) and human-driven vehicles (that is, vehicles that cannot be optimally controlled) on the Y road. In the irregularly arranged traffic flow, there are several self-driving vehicles and human-driven vehicles on the X road to form an irregularly arranged traffic flow that needs to pass through the intersection and pass through the interval between the traffic flows on the Y road in turn. Assume that both autonomous vehicles and human-driven vehicles on road X and road Y follow a microscopic car-following model.
[0254] Upper-level model description: Vehicles pass through the intersection, that is, the process of vehicles waiting to pass...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More