

Robot dynamics parameter identification method independent of angular acceleration of joints
A technology of dynamic parameters and identification method, which is applied in the field of robot dynamic parameter identification that does not depend on joint angular acceleration, can solve the problem of low accuracy of parameter identification, and achieve the effect of simple expression and small amount of calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0038] In this embodiment, a method for identifying dynamic parameters of a robot independent of joint angular acceleration is disclosed, including the following steps:
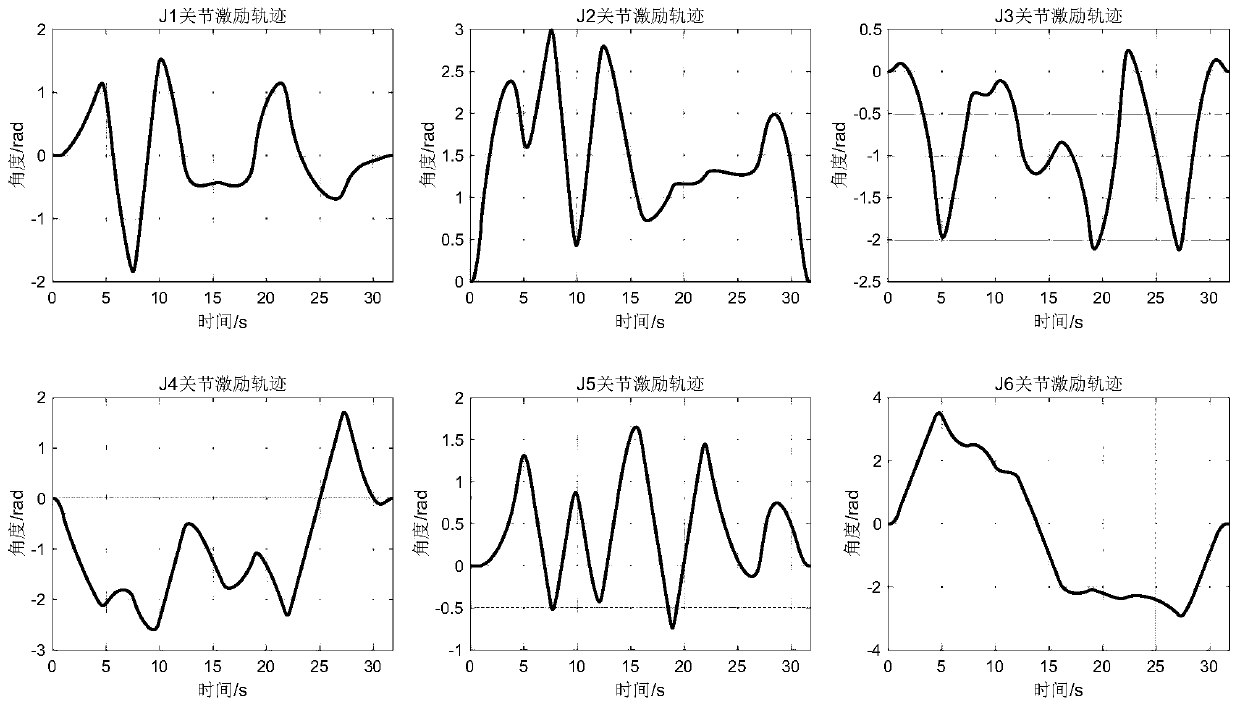
[0039] Step 1: Design the optimized excitation trajectories of all joints of the robot, and drive the robot to start moving, wherein each joint of the robot moves according to their respective optimized excitation trajectories;
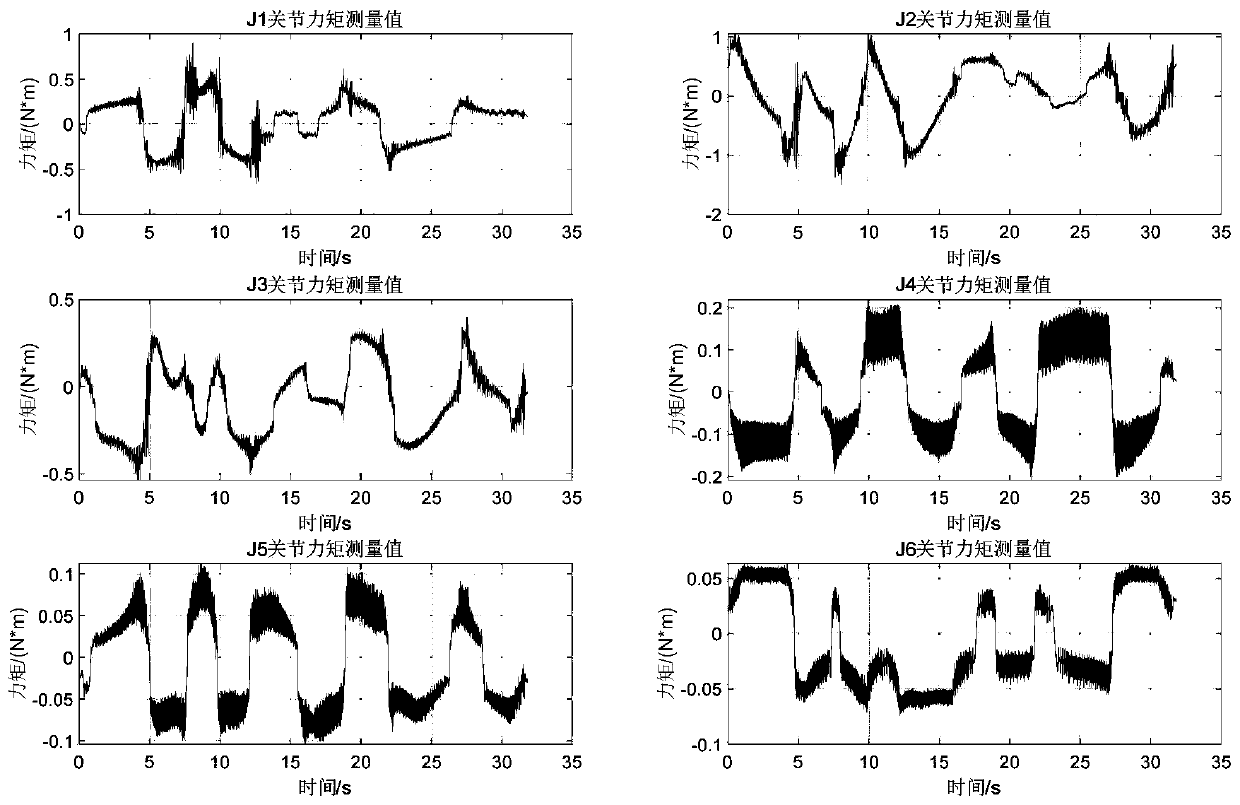
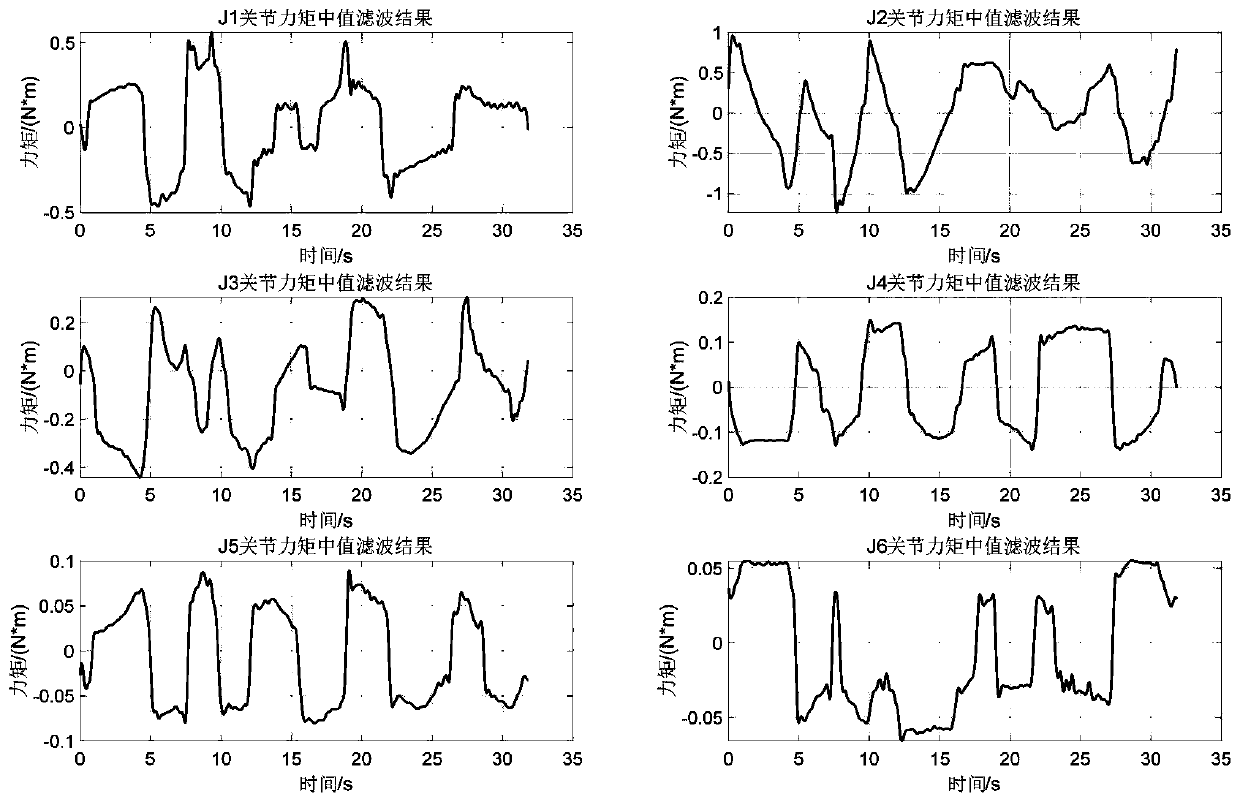
[0040] Step 2: Measuring the joint motion data of the robot motion process, the joint motion data includes joint angle values, joint angular velocity values and joint torque values, and then smoothing and filtering the joint motion data;
[0041] Step 3: Establish the robot energy model Y=WX, wherein, Y represents the joint motion data matrix, W represents the regression matrix, and X represents the dynamic parameter set;
[0042] Step 4: Get the dynamic parameter identification model based on the robot energy model obtained in step 3 where W + is the pseudo-inverse matrix of W,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More