

Clutter rank estimation method and device based on uncertain priori knowledge
A technology of prior knowledge and clutter rank, which is applied in the field of clutter rank estimation based on uncertain prior knowledge, can solve the problems of large clutter rank error and poor filter clutter suppression performance, and improve robustness , good application, and the effect of guaranteeing clutter suppression performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
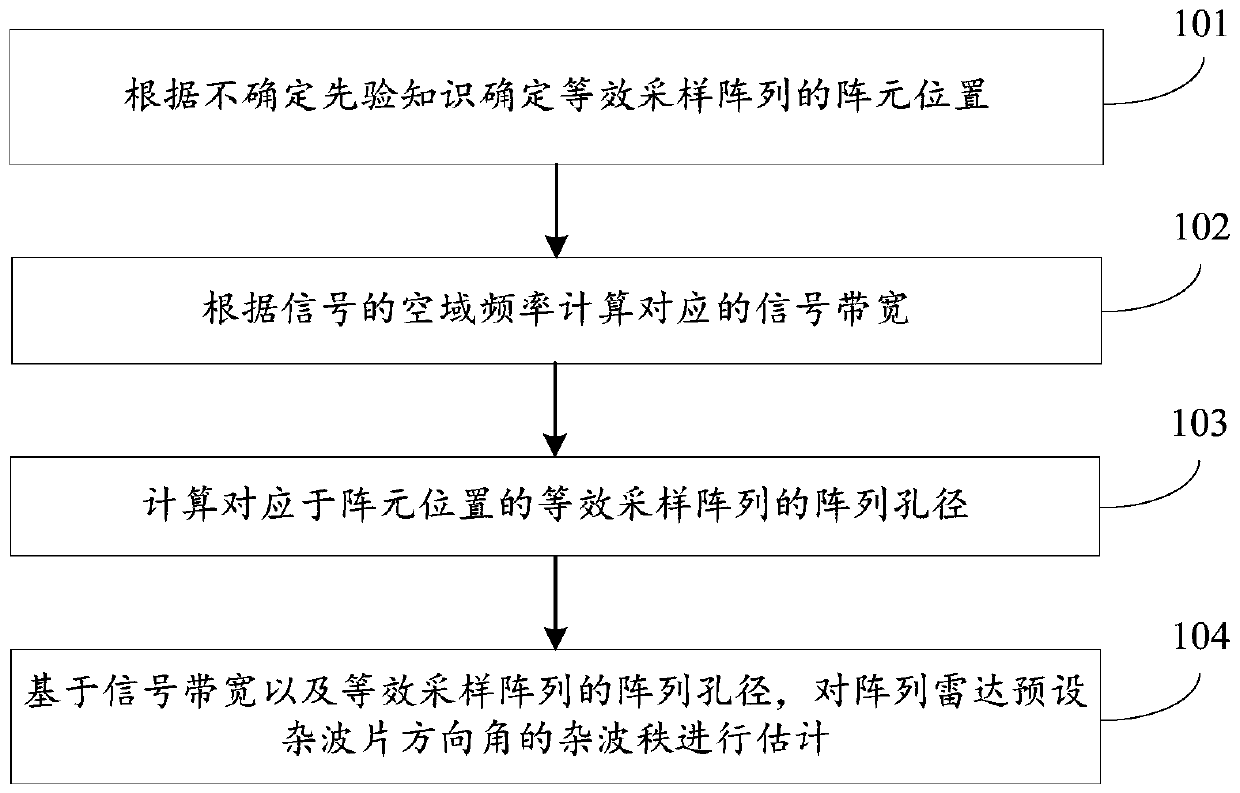
[0027] In order to solve the technical problems in the related art that the estimated clutter rank error is large and the clutter suppression performance of the filter is poor when the clutter rank is estimated based on prior knowledge with errors, this embodiment proposes a method based on The clutter rank estimation method with uncertain prior knowledge, such as figure 1 Shown as a schematic diagram of the basic flow of the clutter rank estimation method provided in this embodiment, the clutter rank estimation method proposed in this embodiment specifically includes the following steps:
[0028] Step 101: Determine the element position of the equivalent sampling array according to the uncertain prior knowledge.
[0029] In an optional implementation manner of this embodiment, the specific implementation manner of step 101 can be expressed as follows:
[0030] Obtain the space-time steering vector component model corresponding to the nth array element and the mth pulse echo of the a...
no. 2 example
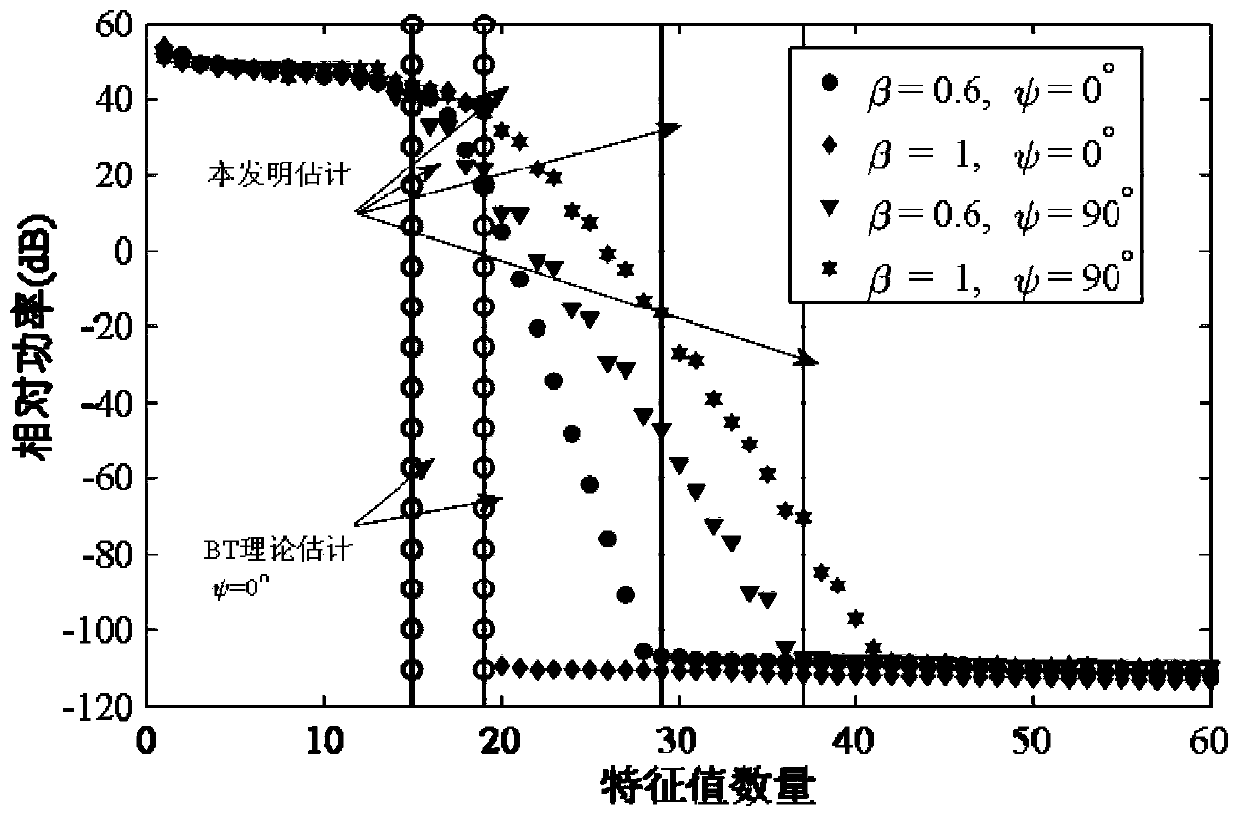
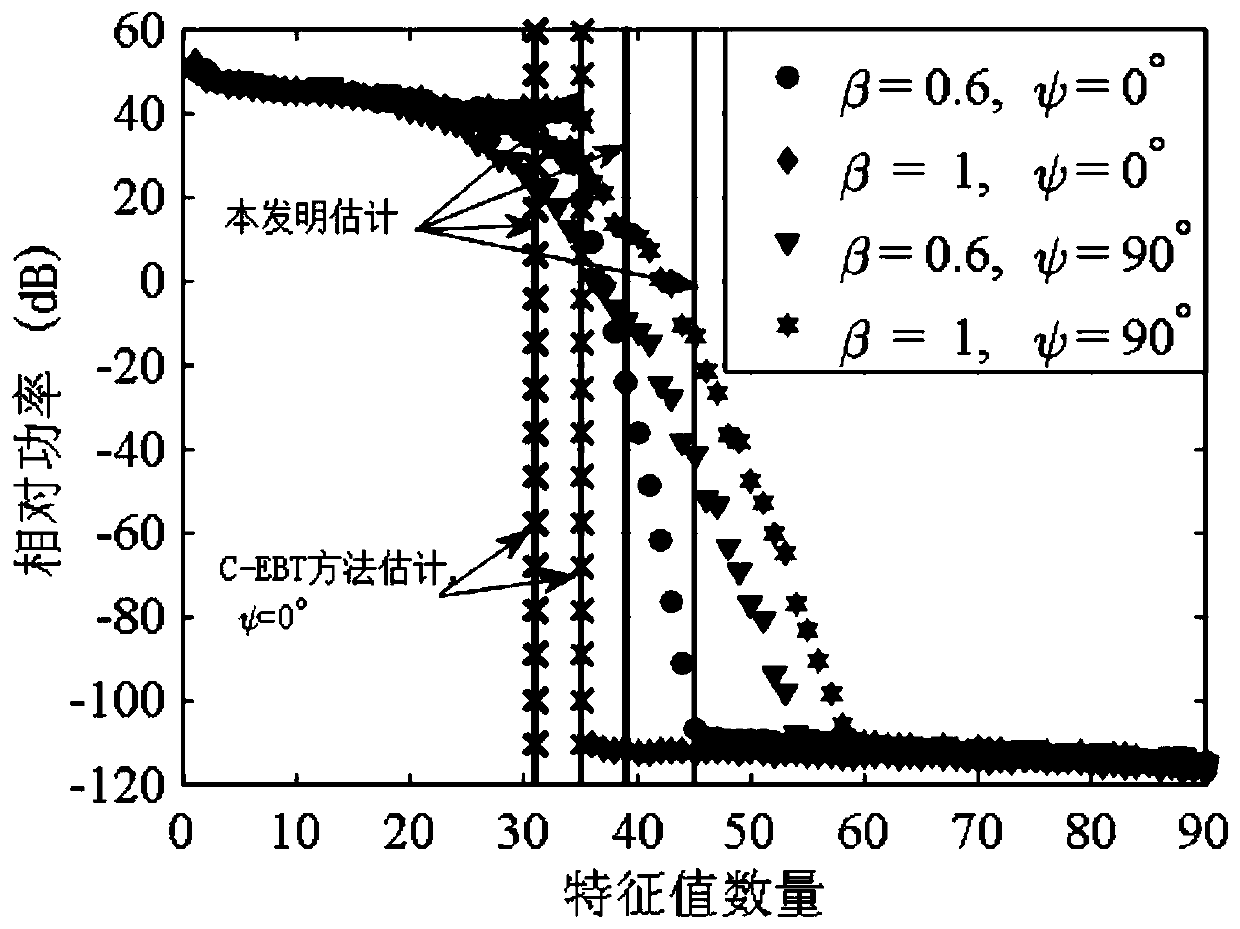
[0061] In order to better explain the content of the present invention, this embodiment uses a specific example to explain the effect of the present invention.
[0062] In this embodiment, simulation data is used to illustrate the beneficial effects of the present invention in clutter rank estimation. Assuming radar parameter h p =125m / s,v p =4000m,T r =1 / 4000s and d 0 =0.0625m, where h p Is the height of the airborne platform, v p Is the onboard speed, T r Is the pulse repetition interval, d 0 Is the array unit interval. The clutter in a given range is divided into 361 clutter plate blocks and assuming that each clutter plate obeys the same distribution, at a given clutter-to-noise ratio CNR (in decibels), each clutter obeys an average value of 0, Variance of 10 10 / (361CNR) Complex Gaussian process. The thermal noise of the receiver obeys the mean value of 0, and the variance Complex Gaussian process. In the simulation experiment of this embodiment, unless otherwise specifie...
no. 3 example
[0067] In order to solve the technical problem in the related art that the estimated clutter rank error is large and the clutter suppression performance of the filter is poor when the clutter rank is estimated based on prior knowledge with errors, this embodiment shows a method based on Clutter rank estimation device with uncertain prior knowledge, please refer to image 3 , The clutter rank estimation device of this embodiment includes:
[0068] The position determination module 301 is used to determine the position of the element of the equivalent sampling array according to the uncertain prior knowledge;
[0069] The bandwidth calculation module 302 is configured to calculate the corresponding signal bandwidth according to the spatial frequency of the signal;
[0070] The aperture calculation module 303 is used to calculate the array aperture of the equivalent sampling array corresponding to the position of the array element;
[0071] The clutter rank estimation module 304 is used ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More