

Wearable robot for upper limb rehabilitation training with precise force control
A rehabilitation training and wearable technology, applied in passive exercise equipment, physical therapy, etc., can solve the problems of lack of safety and individuality, unreasonable structure, poor wearing comfort, etc., to reduce hospitalization, compact structure, and accurate rehabilitation training Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The technical solution of the present invention will be described in further detail below in conjunction with the accompanying drawings and embodiments.
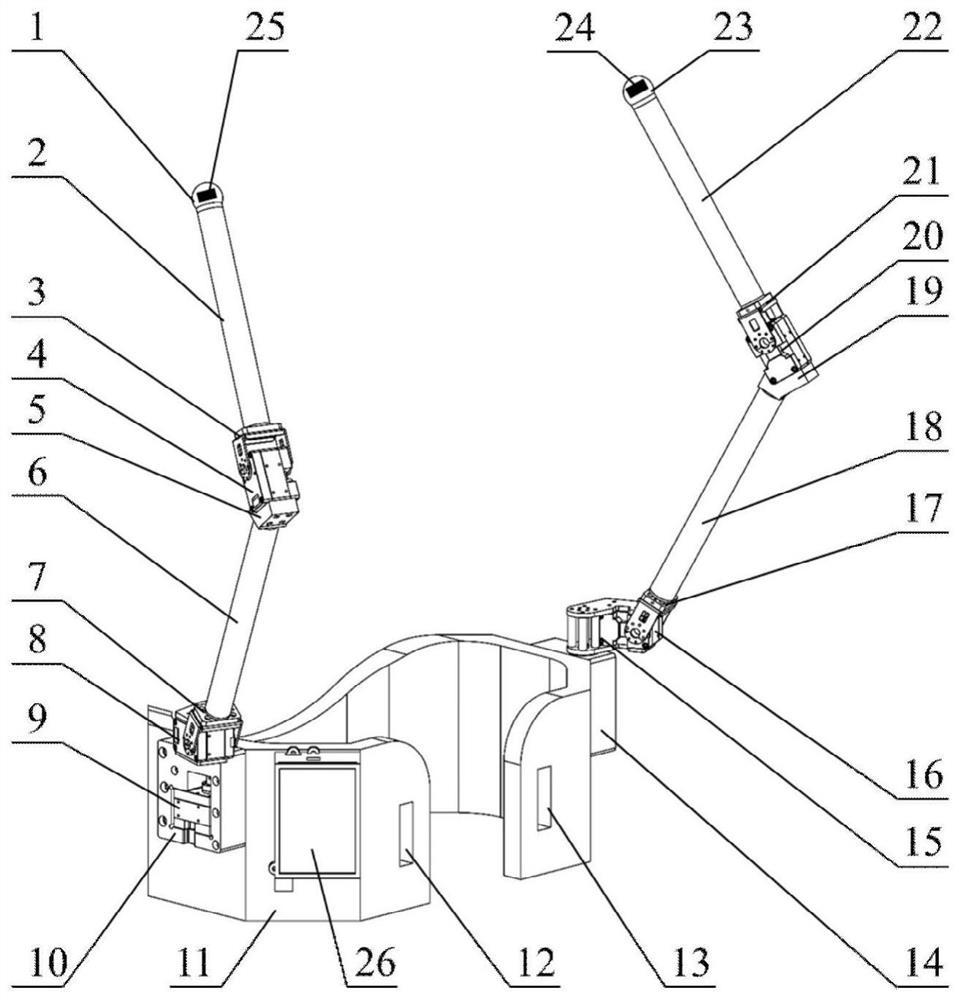
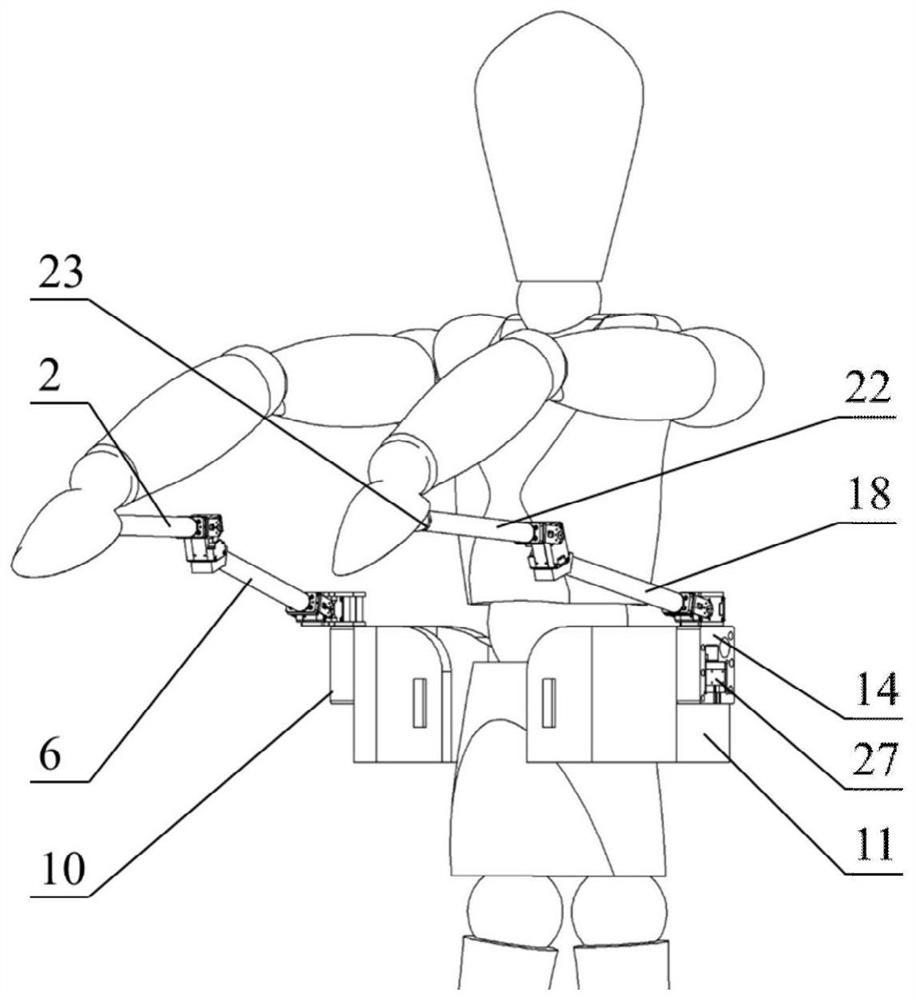
[0020] like figure 1 As shown, a three-degree-of-freedom wearable upper limb rehabilitation training robot with precise force control, the left and right mechanical arms are installed on the wearable belt, and the control box for controlling the robot's work is packaged in the belt.
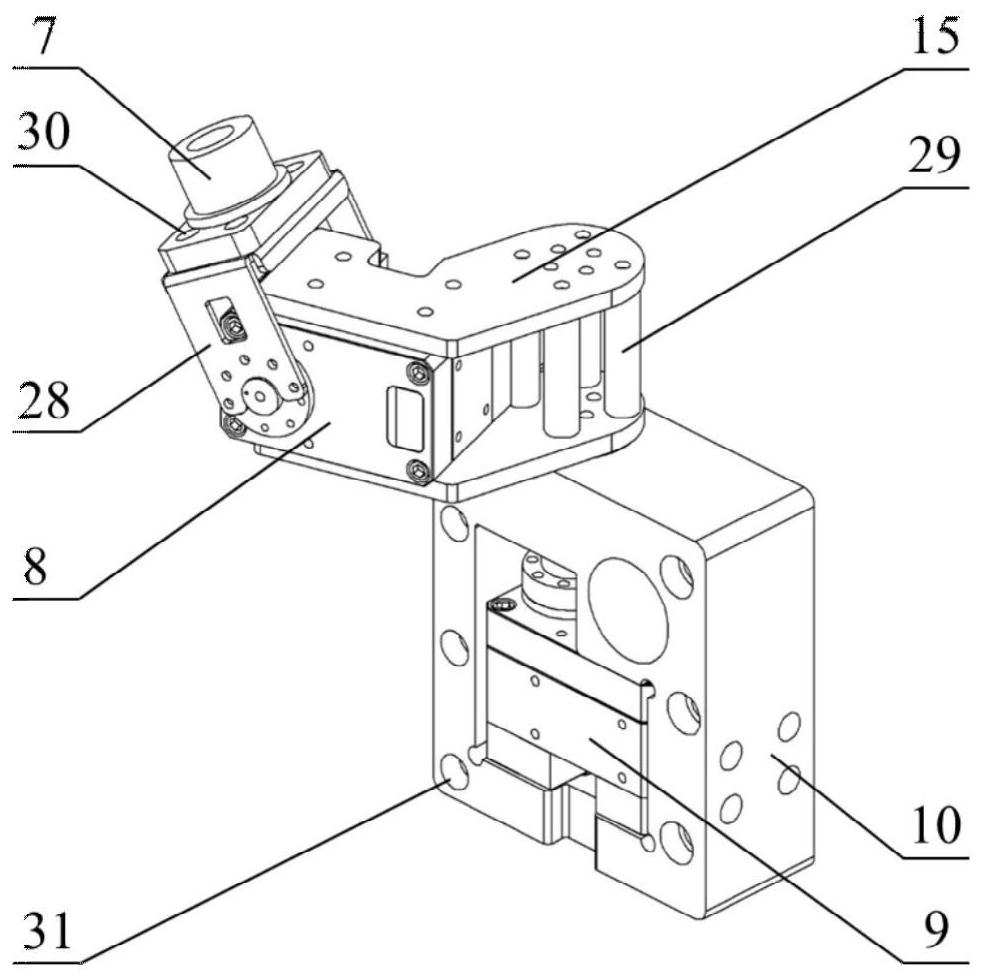
[0021] Specifically, the robot includes the end 1 of the right mechanical arm, the second link 2 of the right mechanical arm, the third right active actuator-the second link connecting piece 3, the third right active actuator 4, and the third right active actuator- The first link connector 5, the first link 6 of the right mechanical arm, the first link-U-shaped bracket connector 7, the second right active actuator 8, the first right active actuator 9, the base of the right mechanical arm 10. Wearable belt 11, one hole for Velcro install...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More