

Automatic loading and unloading system for logistics robot
A logistics robot, automatic loading and unloading technology, applied in the direction of loading/unloading, transportation and packaging, conveyor objects, etc., can solve the problems of unable to meet the high-efficiency requirements of logistics transportation, irregular cargo application scenarios, and unsatisfactory loading and unloading space, etc., to achieve the path The effect of convenient planning, overcoming irregular clothing unloading space and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The present invention will be further described in detail in conjunction with the accompanying drawings and specific embodiments.
[0024] In order to facilitate a unified review of the various reference signs in the drawings of the specification, the unified description of the reference signs appearing in the drawings of the specification is as follows:
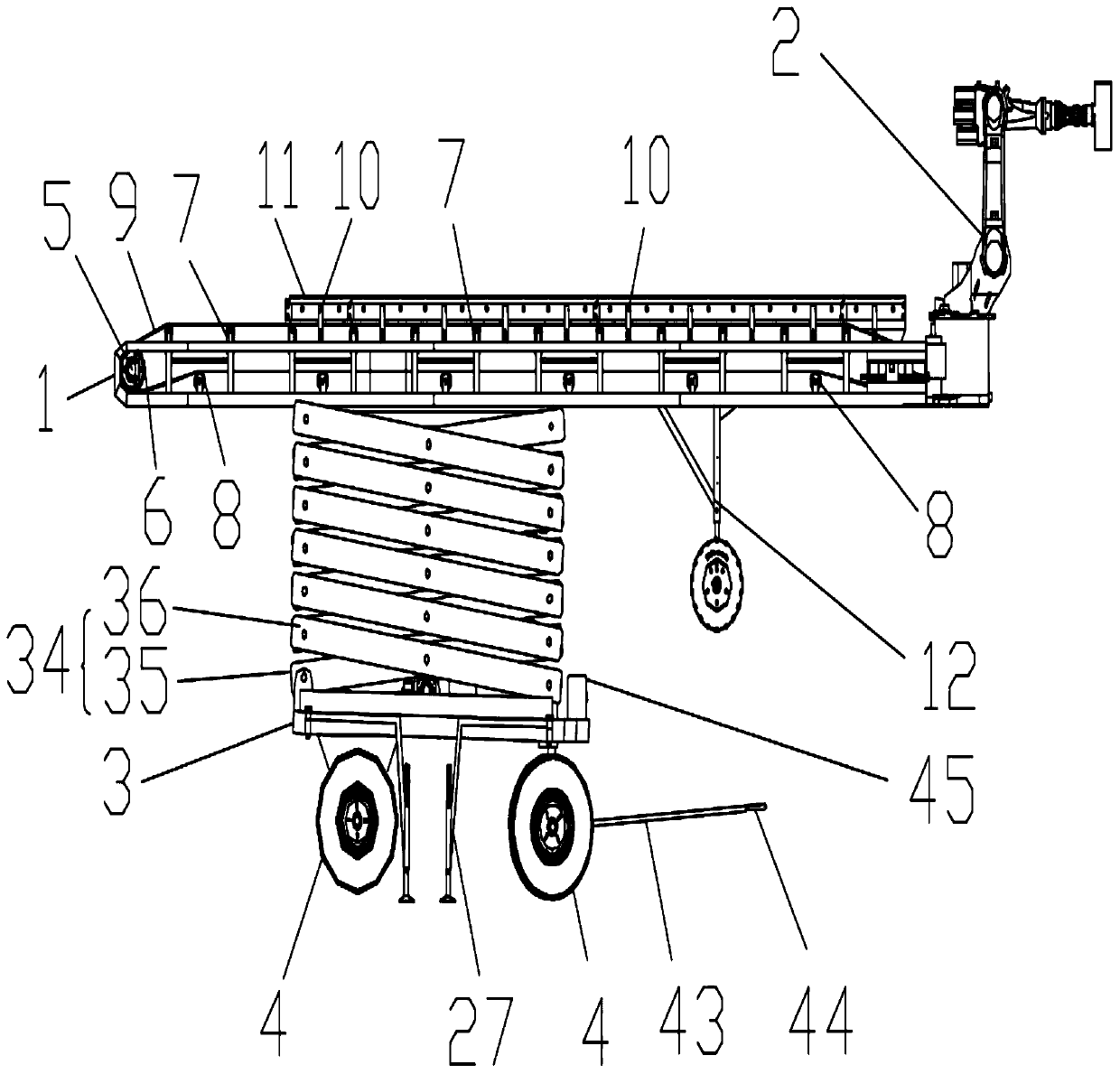
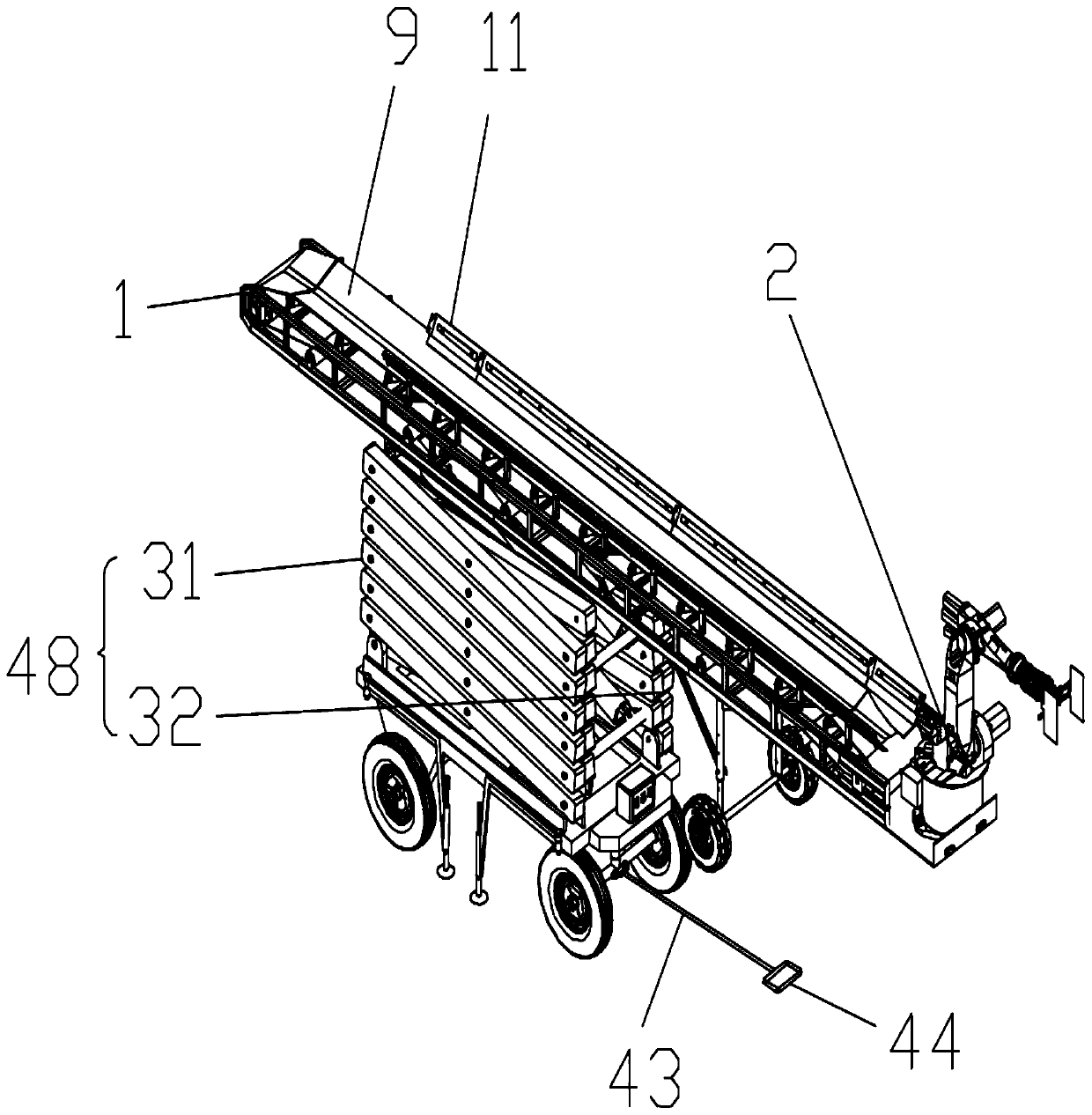
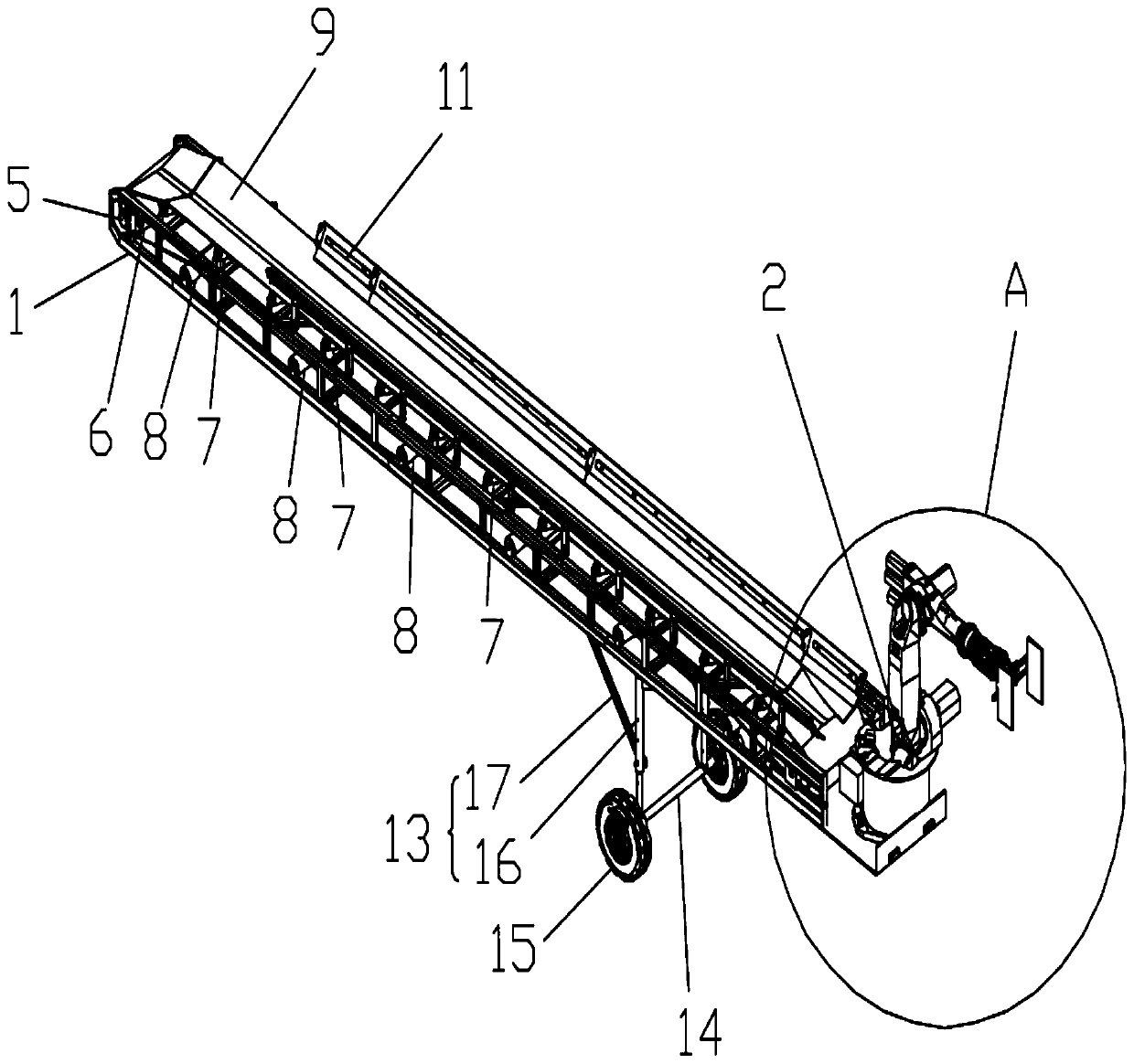
[0025] 1 is the bracket, 2 is the loading and unloading mechanical arm mechanism, 3 is the bottom plate, 4 is the wheel, 5 is the driving motor, 6 is the driving wheel, 7 is the driven wheel, 8 is the tightening wheel, 9 is the feeding belt, 10 is the support column, 11 12 is a hydraulic support mechanism, 13 is a hydraulic support group, 14 is a straight shaft, 15 is a support wheel, 16 is a support hydraulic cylinder, 17 is a reinforcement rod, 18 is a support plate, 19 is a base, 20 is a turntable, 21 is the first servo motor, 22 is the second servo motor, 23 is the first swing arm, 24 is the second swing arm, 25 i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More