

Target positioning method based on arrival time in mixed sight distance and non-sight distance environment
A time-of-arrival and target positioning technology, applied in the field of target positioning, can solve the problems of positioning performance loss and complexity reduction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
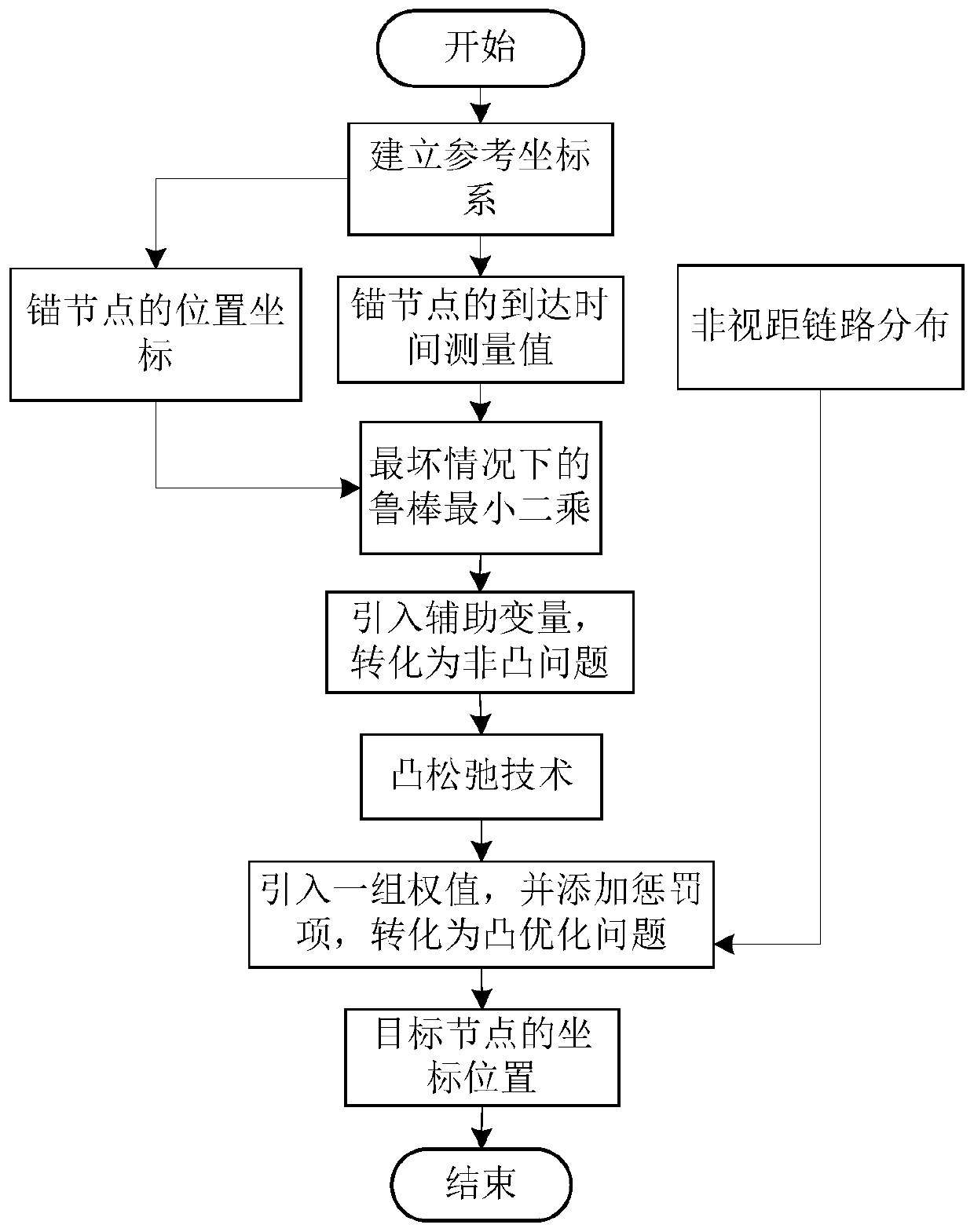
[0024] A time-of-arrival target positioning method proposed by the present invention in a mixed line-of-sight and non-line-of-sight environment, its overall realization block diagram is as follows figure 1 As shown, it includes the following steps:
[0025] Step 1: Set an unknown target node and N known anchor nodes in the wireless sensor network, and set the distribution of line-of-sight links and non-line-of-sight links in the wireless sensor network to be known; The sensor network establishes a plane coordinate system as the reference coordinate system, and records the coordinate position of the target node in the reference coordinate system as x, and records the coordinate position of the i-th anchor node in the reference coordinate system as s i ; Wherein, N is a positive integer, N≥3, in this embodiment, N=8, i is a positive integer, th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More