

Motion control method for flexible endoscope operation robot
A technology of motion control and endoscopy, applied in the field of medical robots, can solve the problems of inconvenient operation of endoscopes by robots
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
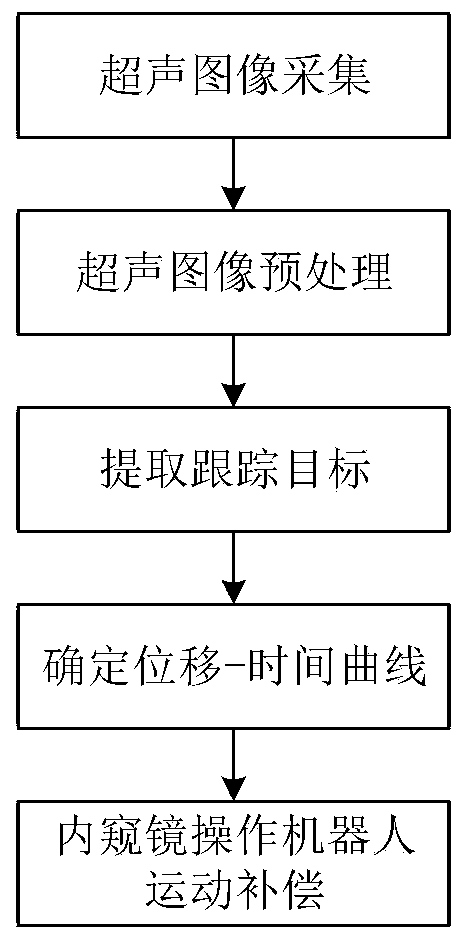
[0030] The invention proposes a motion control method for a flexible endoscope operating robot, which is used to eliminate the displacement deviation between the organ and the manipulator at the end of the endoscope caused by respiratory movement after the endoscope enters the human cavity.
[0031] [1] Firstly, before the endoscope enters the human cavity and after all preparations are completed, the ultrasonic images of the organs under the condition of stable human breathing are collected.
[0032] [2] Do filter preprocessing on the collected ultrasound images.
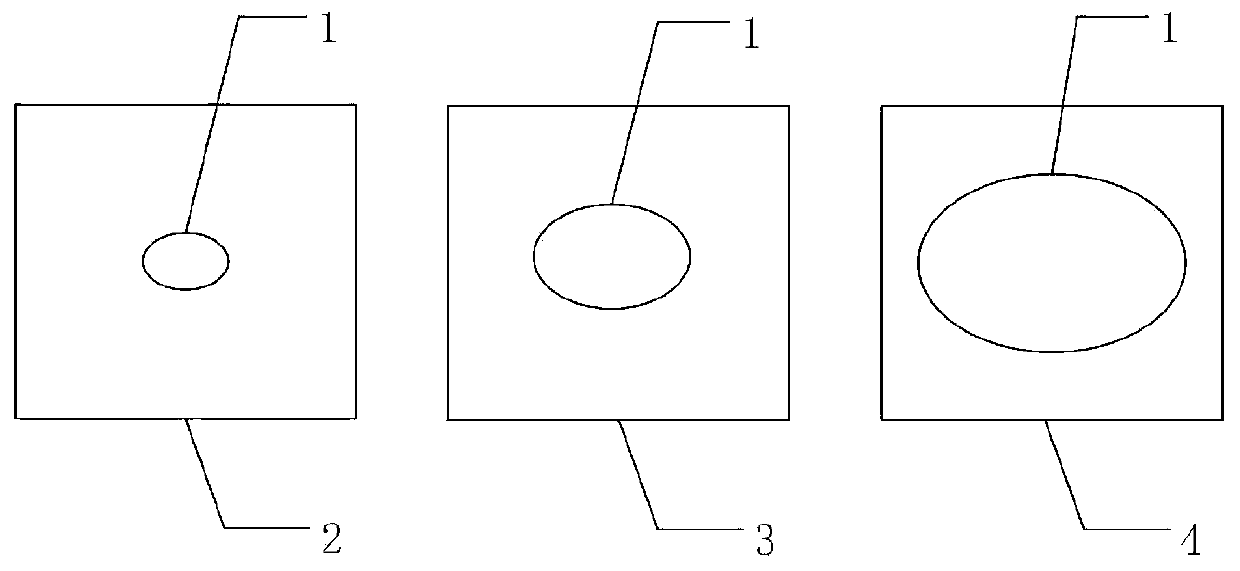
[0033] [3] Extract the outline of the target organ or the key feature points in the tissue and organ from the ultrasound image.
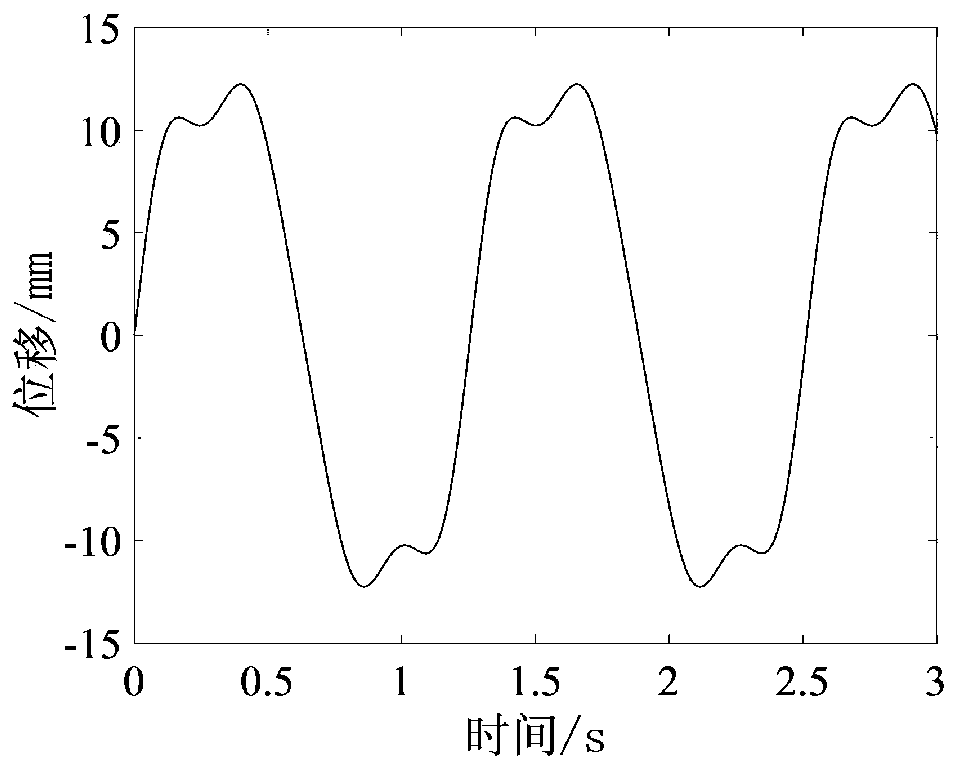
[0034] [4] Then record the position of the center point or feature point of the organ contour at different times, so as to determine the displacement-time curve of the human organ in the up and down direction, such as image 3 .
[0035] [5] If Figure 4 As shown, after the endoscope ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More