

Artificial limb movement intention identification method and device based on source-end fusion
A technology of motion intention and identification method, applied in the field of information processing, can solve the problems of inability to 100% determine the accurate road conditions, complex algorithms, easy judgment errors, etc., to achieve the effect of overcoming the complexity of the data processing process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be described in further detail below with reference to the accompanying drawings and preferred embodiments. However, it should be noted that many of the details listed in the specification are only for readers to have a thorough understanding of one or more aspects of the present invention, and these aspects of the present invention can be implemented even without these specific details.
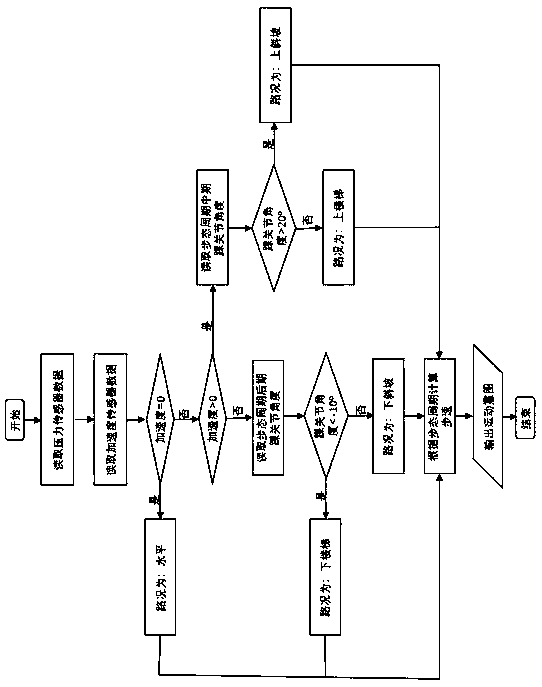
[0032] The flow chart of the prosthetic motion intention recognition method based on source fusion proposed in this embodiment is as follows figure 1 As shown, the processor analyzes the distribution of ground support reaction force through the pressure sensor set on the prosthetic foot, judges the gait cycle, and calculates the pace; through the data collected by the acceleration sensor set at the knee joint of the prosthesis, it distinguishes between flat ground...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More