

Lower limb movement pose quick predicting system and method based on fusion of a plurality of sensors
A multi-sensor fusion and prediction system technology, applied in the direction of sensors, instruments, diagnostic recording/measurement, etc., can solve problems such as poor synergy, large time delay, and inability to achieve rapid prediction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
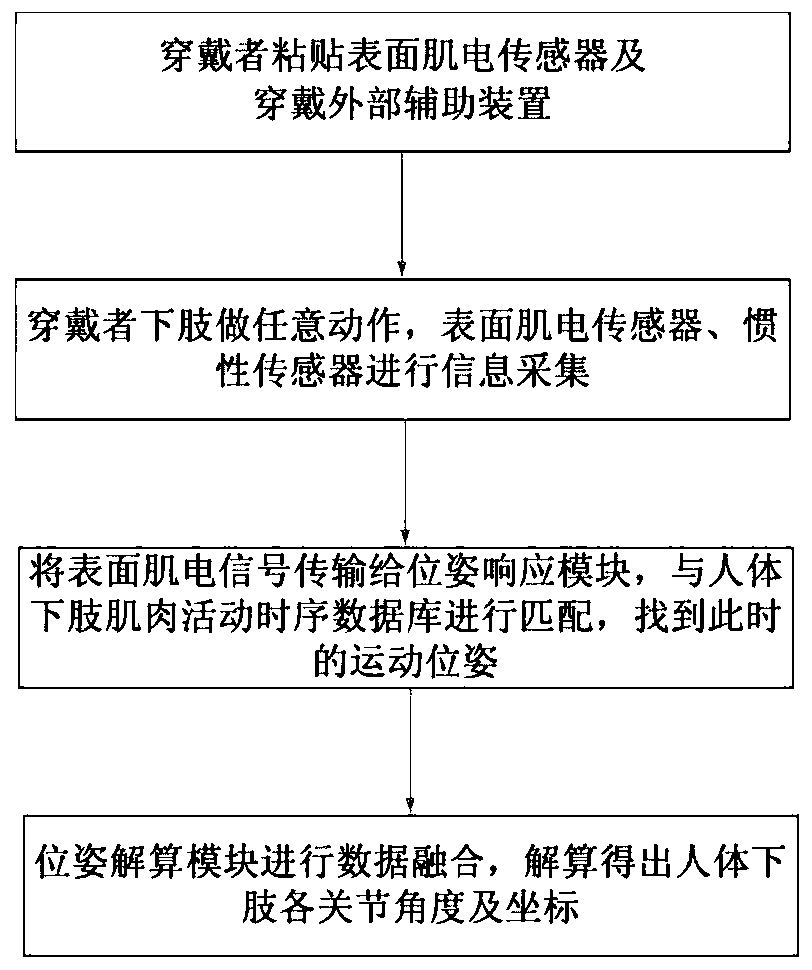
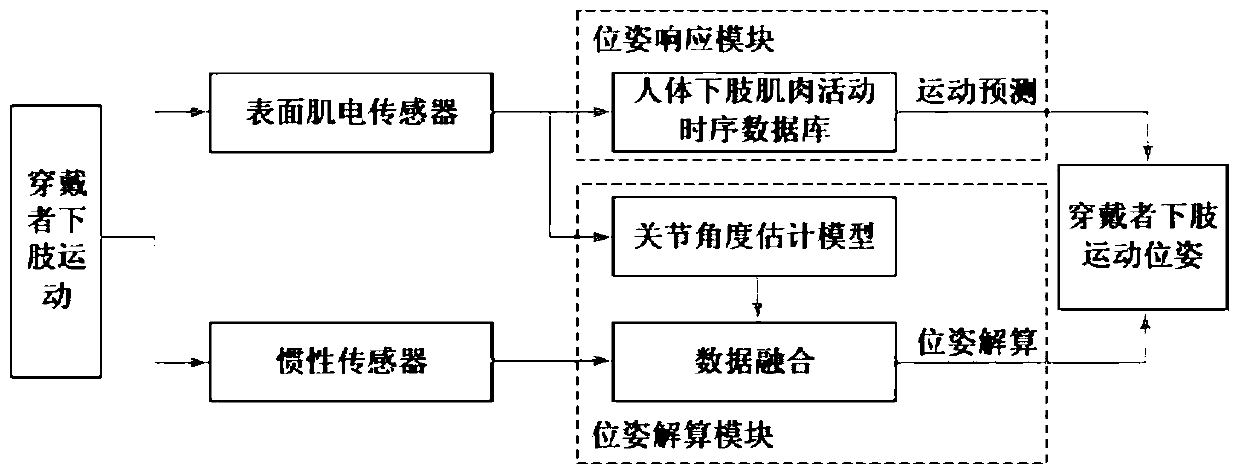
[0079] The present invention proposes a fast prediction system for lower limb movement posture based on multi-sensor fusion, which includes a surface electromyography sensor, an inertial sensor, a posture response module, a posture calculation module and an external auxiliary device.
[0080] figure 2 It is the principle diagram of the rapid prediction system of human lower limbs motion posture based on multi-sensor fusion in the present invention.
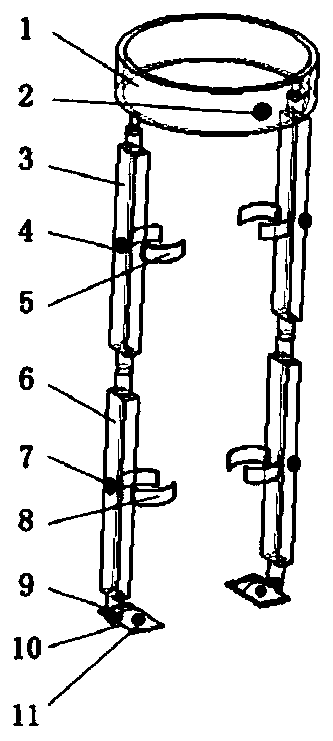
[0081] Specifically, the external auxiliary device is worn on the waist and lower limbs of the wearer, and can move with the left and right lower limbs of the human body. Such as image 3 As shown, the external auxiliary device includes a waist board 1, a thigh outer board 3, a thigh fixing strap 5, a calf outer board 6, a calf fixing strap 8, a pedal 10 and a pedal strap 9, and the waist board 1 is worn on The wearer's waist, the outer thigh plate 3 is worn on the outer side of the wearer's thigh through the thigh fixing strap...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More