

Automatic extraction method for multi-station three-dimensional laser point cloud target ball data
A three-dimensional laser, automatic extraction technology, applied in the direction of using optical devices, instruments, measuring devices, etc., can solve the problems of integration, unable to obtain fixed point positions through prisms, and different three-dimensional laser scanners, so as to reduce the overall error and improve the measurement. The effect of efficiency and data accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0014] The present invention will be further explained below in conjunction with the accompanying drawings and specific embodiments. It should be understood that the following specific embodiments are only used to illustrate the present invention and are not intended to limit the scope of the present invention.
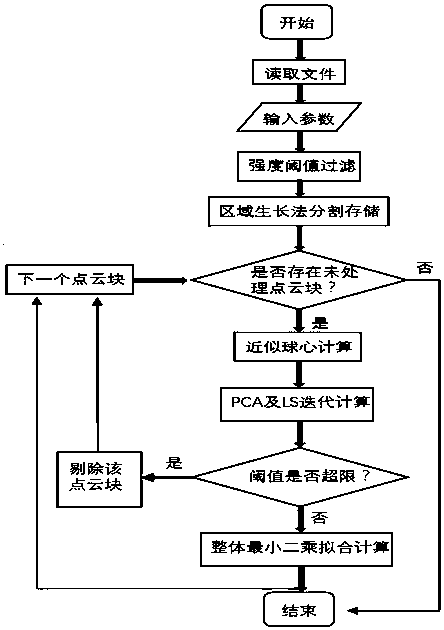
[0015] A multi-station three-dimensional laser point cloud target ball data automatic extraction method according to the present invention comprises the following steps:
[0016] 1. Read the point cloud data file, and set the intensity threshold, precision threshold, PCA threshold, known radius and other information according to the known information.
[0017] 2. Use the intensity threshold to mine high-intensity point cloud blocks and thin them according to density to reduce the amount of computing data. Then use the intensity threshold to filter out the edge points with weak intensity information and separate different point cloud blocks.
[0018] 3. Use the region...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More