

Drop point positioning method based on multi-direction projection
A positioning method and multi-directional technology, applied in the field of image processing, can solve the problem that the camera system cannot accurately record the location of the impacting object, and achieve a highly practical effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The present invention will be further described below in conjunction with specific examples.
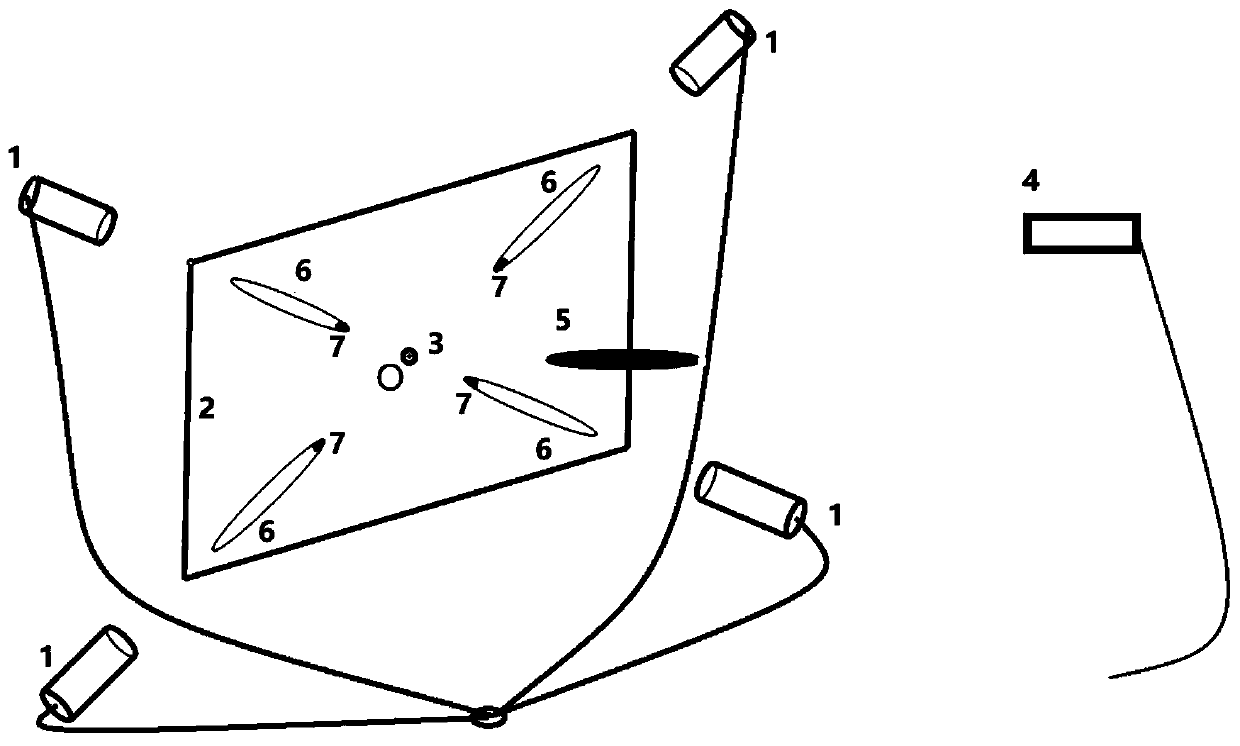
[0019] (1) Adjust the multi-directional projection positioning system. Four illumination light sources 1 are distributed on the four vertices of the target surface 2, their irradiation direction is aligned with point O of the target surface 2, and the position of the camera 4 is fixed at the position facing the target surface 2.
[0020] (2) The camera system acquires 50 frames of projection images on the target surface during the impact process at a capture speed of 30 frames / s.
[0021] (3) Take the shooting time of the first frame of projected image as the time starting point t 1 , then the time of the i-th frame image is t i =f*i(1≤i≤50), so as to obtain the time t corresponding to each frame of image i .
[0022] (4) Calculate the moment t when the object hits the target surface according to the projection 0 . The four projections on the first frame image collected ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More