Pneumatic soft gripper capable of locking joints in vacuum absorption mode
A vacuum adsorption and software technology, applied in the direction of manipulators, manufacturing tools, chucks, etc., can solve problems that affect the flexibility and adaptability of flexible drives, complex control systems, and low working reliability, so as to improve bearing capacity, stability, and rigidity The effect of obvious performance and simple processing
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
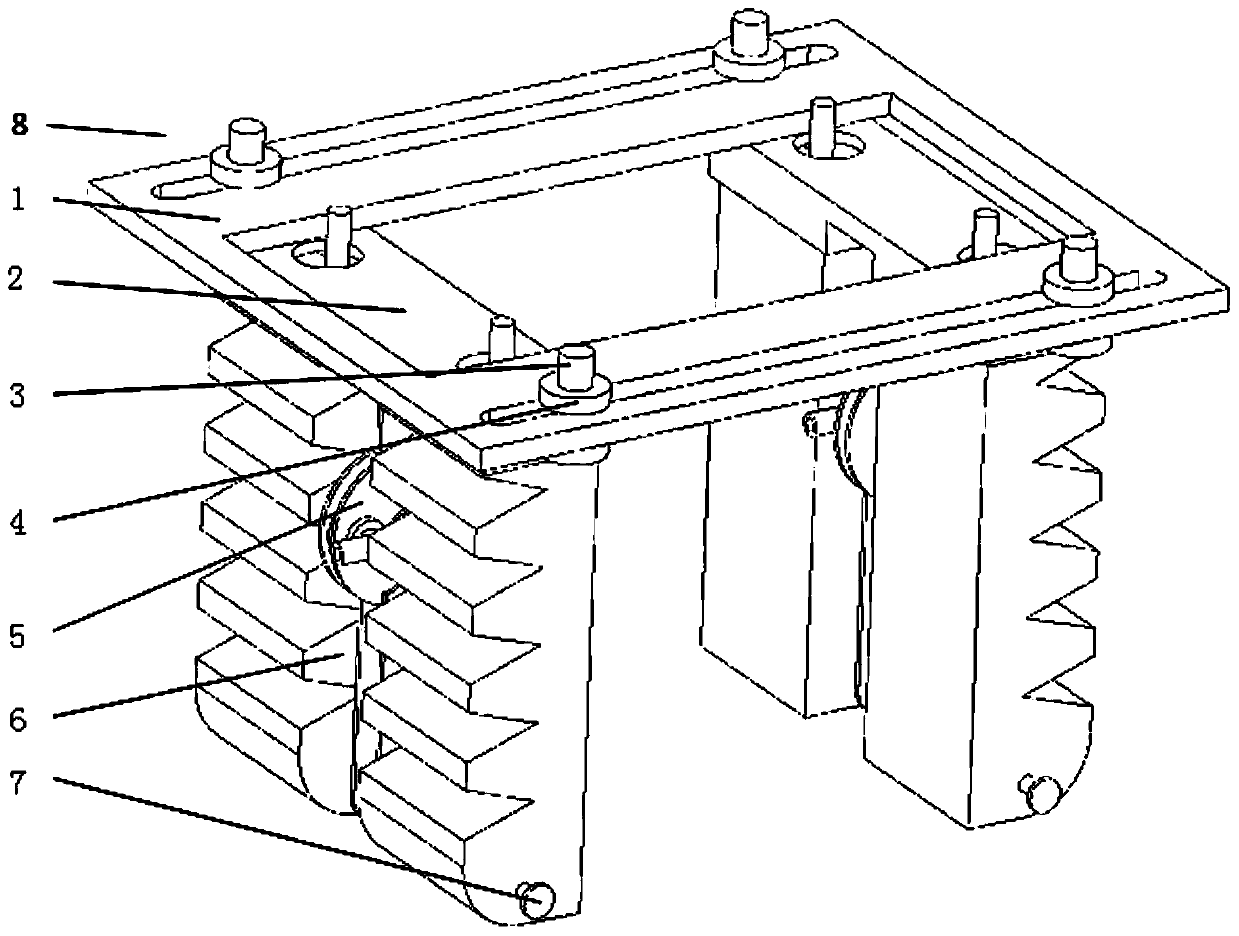
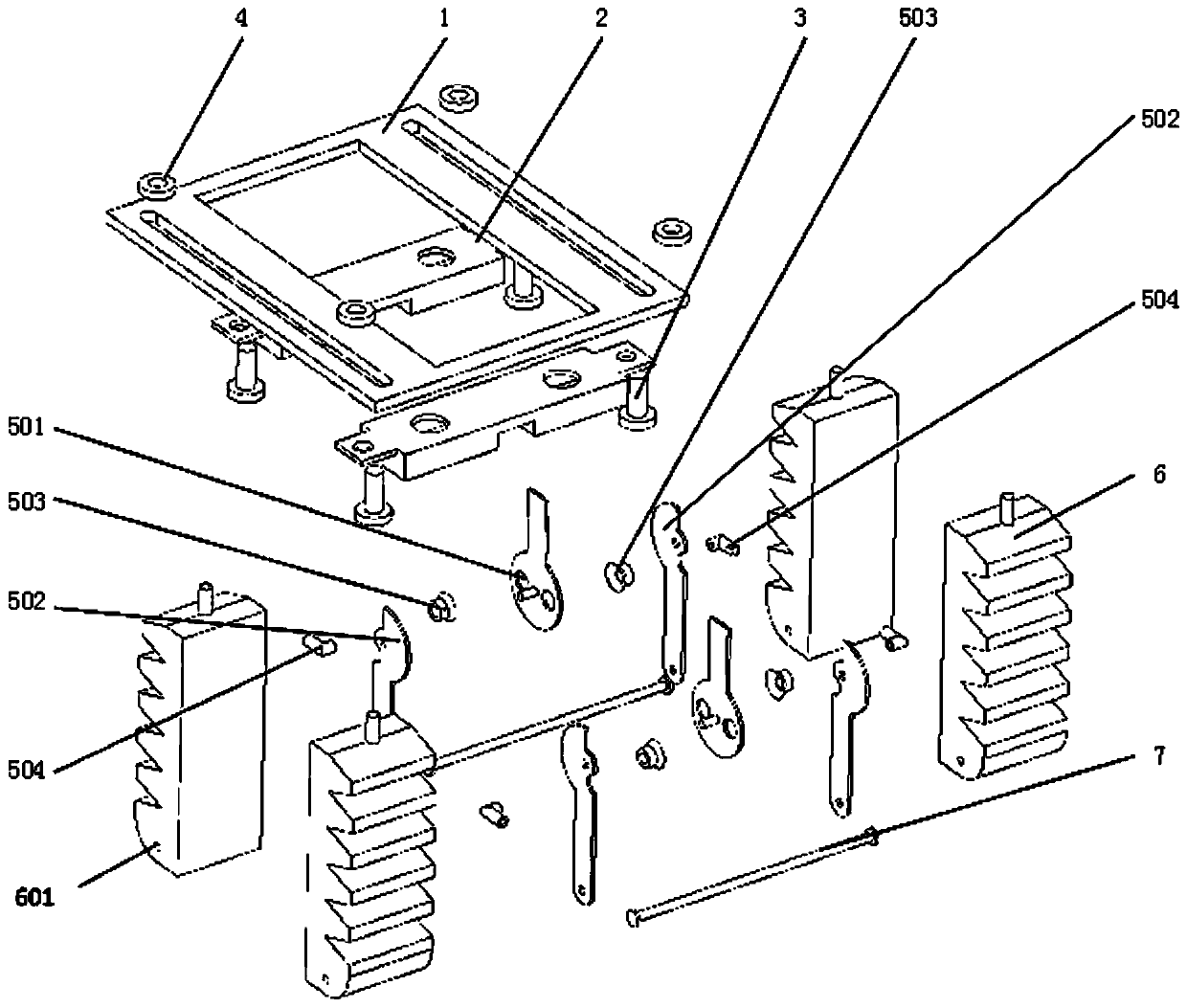
[0023] like figure 1 and figure 2 As shown, this embodiment includes: a retention structure 8, a flexible sucker spine 5 and two pairs of soft fingers 6, wherein: the soft fingers 6 are arranged on the retention structure 8, and the flexible sucker spine 5 is arranged on each pair of soft fingers 6 Between to control the relative position of the soft finger 6.
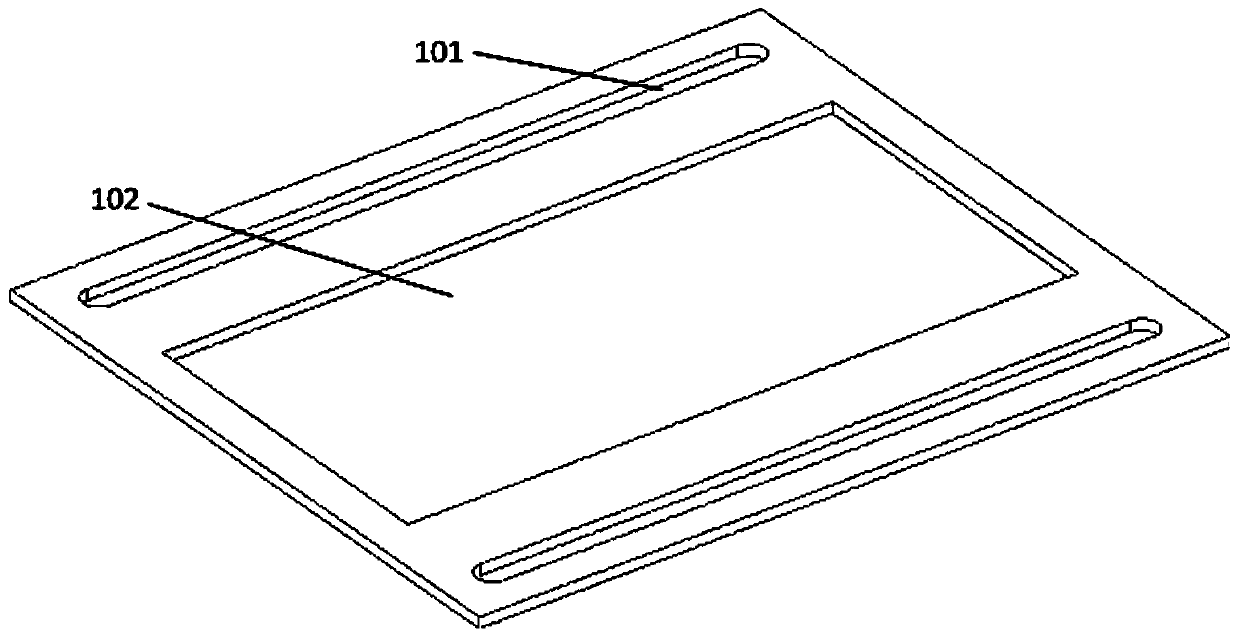
[0024] The retaining structure 8 includes: a fixing plate 1, two adjusting plates 2 and a connecting rod 7, wherein: the adjusting plate 2 is arranged in the chute 101 of the fixing plate 1 through the cooperation of the bolt 3 and the nut 4, and each adjusting plate The plate 2 is fixedly connected with the roots of a pair of juxtaposed soft fingers 6 , and the connecting rod 7 runs through the spine 5 of the flexible suction cup and the circular hole 601 at the end of the soft fingers 6 .
[0025] like image 3 As shown, the two sides of the fixed plate 1 are provided with sliding grooves 101 to change the relati...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More