

UAV (Unmanned Aerial Vehicle) attitude estimation method based on single antenna GPS and IMU under large maneuvering conditions
A large maneuvering, single-antenna technology, applied in the field of UAV navigation, can solve problems such as large solution error, poor high-frequency dynamic characteristics, and cumulative error of gyroscope integration, achieving fast operation speed, low hardware requirements, and low cost. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0059] The present invention will be described in detail below in conjunction with the accompanying drawings.
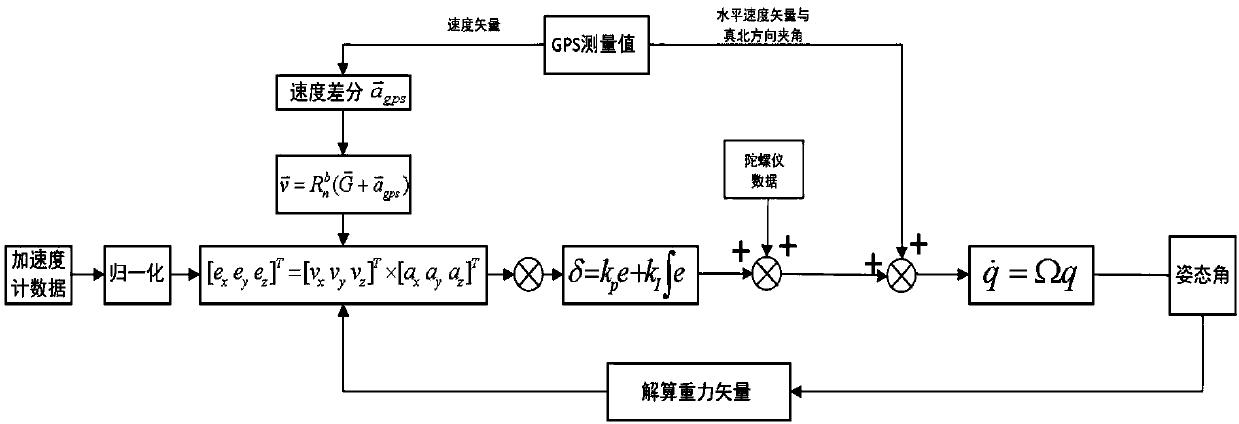
[0060] A UAV attitude estimation method under large maneuvering conditions based on single-antenna GPS and IMU, such as figure 1 shown, including the following steps:
[0061] Step 1: Set the initial attitude quaternion and process the sensor data. Low-pass filtering is performed on the output data of the gyroscope and accelerometer, and the difference of the GPS measurement value is obtained to obtain the linear acceleration compensation accelerometer data;
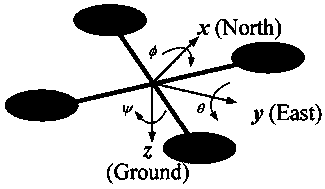
[0062] Step 2: Construct the transformation matrix according to the attitude quaternion, and use the accelerometer data to calculate the error amount of the reference attitude quaternion. The coordinate system is defined as image 3 shown;
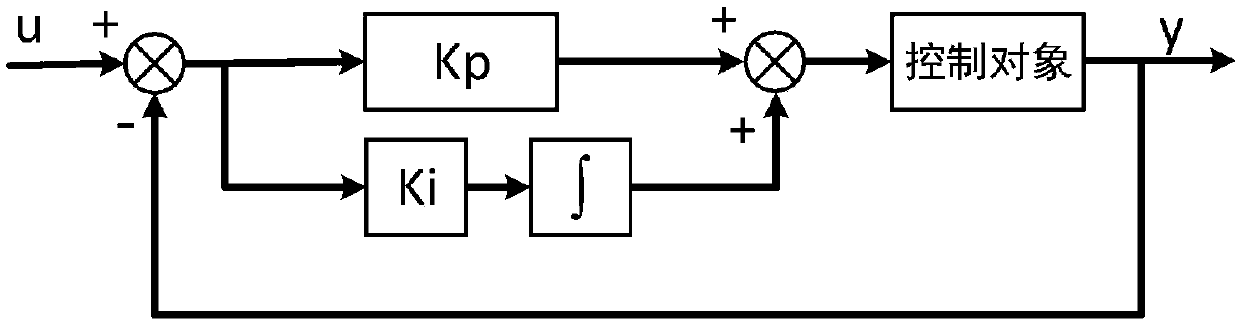
[0063] Step 3: Design a PI controller to complete the compensation of the accelerometer to the gyroscope drift. The principle of the PI controller is as follows figure...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More